
Roll Motion Prediction of PSV with Anti-rolling Tank Based on RANS and Nonlinear Dynamic Method
2015-12-12 08:52OUShanMAOXiaofeiaJINMengWUMinghao
船舶力學 2015年9期
OU Shan,MAO Xiao-feia,,JIN Meng,WU Ming-hao
(a.Key Laboratory of High Performance Ship Technology of Ministry of Education;b.Transportation School,Wuhan University of Technology,Wuhan 430063,China)
0 Introduction
The roll motion behavior of a ship is one of the most important aspects in sea-keeping.The excessive roll motion and large roll angle will limit the performance of the ship and may lead to capsize and cause casualty.An effective way to control the roll motion is to increase the roll damping moment.Based on this idea,many anti-rolling devices are invented such as bilge keel,fin stabilizer,rudder roll stabilization,active anti-rolling tank and passive anti-rolling tank[1](U-tank and free-surface tank).The passive ART is designed using the concept of‘double resonance’which means the natural frequencies of the tank and the ship are similar[2].When the double resonance occurs,the hydrodynamic moment caused by ART is in the opposite phase to the wave exciting moment and will produce a damping moment to decrease the rolling angle.Compared with the fin stabilizer,the passive ART is simple-instructure,economical and easy for maintenance and can have good performance without the low speed limit.
In this study,the roll motion of a PSV with an ART is analyzed.A series of model tests were performed to validate the reduction of roll angle when using the anti-rolling tank.One of the key problems in this study is to accurately estimate roll damping of the ship with tank.Prediction of roll damping of a ship usually depends on semi-empirical formulas and model tests,see Ikeda et al[3-4].However,the roll damping of tank is seldom treated by empirical methods.Recently,CFD method is successfully applied in calculating the roll damping and simulating the nonlinear free-decay and forced rolling motions[5],thus,makes it interesting to solve this ship-tank coupling problem.In this paper,based on a ship-tank decoupling physical model,the damping force of both the ship and the tank is calculated separately by a RANS solver.The effect of numbers and arrangement of damping baffles is also discussed.
The nonlinear dynamic method is convenient to solve the strongly nonlinear ship motion.Sayed(2011)[6]dealt with the response of a two-degree-of-freedom(2DOF)system with quadratic coupling under parametric and harmonic excitations.The method of multiple scale perturbation technique is applied to solve the nonlinear differential equations and obtain approximate solutions up to and including the second order approximations.Chai(2013)[7]used the safe basins theory to study the survivability of ship,the variations of survival probabilities in different sea states and vessel speeds were analyzed.In this paper,the multi-scale method is used to solve the rolling motion equation due to its short computing time compared with model test.From the prediction of roll frequency response,the comparison of anti-rolling effect at maximum peak should show the better baffle and water volume in ART clearly.By using the damping coefficient database based on CFD simulations,and this quick motion prediction method,it is feasible to adjust the real time water depth in ART to meet the load variation of PSV in seaways.
1 Physical and mathematical model of ship-tank problem
1.1 Basic assumptions
The coupled motion between ship and ART is a complex fluid dynamics issue[8-9]due to the fact that the ship motion and the flow in tank would influence each other.At present the problem has not been theoretically solved,but various assumptions are raised to simplify the coupled motion.One common approach is to calculate the hydrodynamics on the ship and ART respectively,then set the hydrodynamic moment produced by the ART as an external force of ship roll motion to run the time-domain iteration.
It is also assumed that the roll motions of ART and ship can be added together at the resonance frequency,because the main concern over the regular wave rolling forecast is the resonance value,which is the most dangerous situation.Therefore,after the respective numerical simulation of the ship and ART,the rolling motion of PSV can be obtained from the damping and the corresponding roll moment,which is produced by the ART under resonance frequency.
1.2 Roll motion equation of ship with ART
Two Cartesian coordinate systems are used to describe the ship motion with ART,fixed coordinate system O0-X0Y0Z0is fixed on the earth,motional coordinate O-XYZ is fixed in ART on the ship and moved together with the ship.
The mathematical model of ship with ART in the beam wave is described with the following nonlinear differential equations.
The ship[10]:

The anti rolling tank:

The ship and ART should have the same roll angle and frequency after the movements become steady in waves,so we can get:
The ship with anti rolling tank:

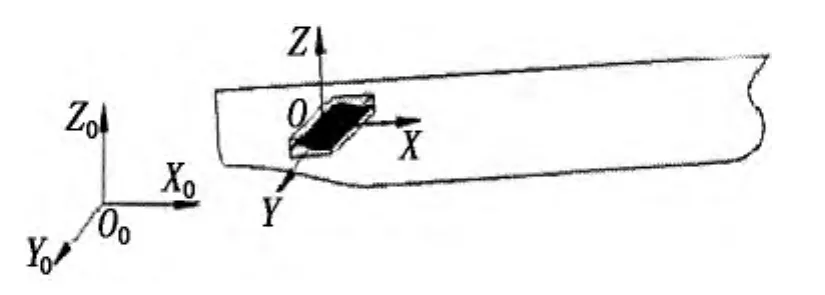
Fig.1 PSV model equipped with passive ART
The subscript‘S’stands for ship,the subscript‘T’stands for tank.Ixxis mass moment of inertia,δIxxis added mass moment of inertia,BLis linear damping coefficient BL=BLS+BLT,BNis nonlinear damping coefficient BN=BNS+BNT,Δ is ship displacement,mTis mass of water in ART,r is radius of curvature about tank water’s gravity movement which is supposed as circular motion,andwhere ixis axial moment of inertia for free surface area of tank water through its centroid,V is volume of tank water.ΔGZ(φ)is the ship restoring moment in still water,MS=fasin(ωt),and MTis roll moment of tanks,
Each term in Eq.(1)has been derived under the Froude-Krylov hypotheses and long wave approximation.It must be stressed that the motion equations of added inertia and damping terms are independent of frequency in this work.This is not strictly consistent with the hydrodynamic approach to the wave-hull interaction.But damping term only works in a narrow range of rolling frequency,so the effect of damping is almost negligible outside the peak area.
1.3 Solving hydrodynamic coefficients with RANS method
1.3.1 RANS method
The roll moment of the ship and the ART is calculated by RANS solver FLUENT.In order to obtain the added mass and damping coefficient,the forced roll motion simulations of the tank and ship are performed respectively.The VOF method is used to capture the free surface.The UDF commands scheme is compiled to control the forced rolling movement of the tank or the ship.The k-ε turbulence model and PISO are adopted.
The principal dimensions of the PSV and ART are listed in Tab.1 and Tab.2,respectively.CFD model of PSV is shown in Fig.2.
The tank form and the baffles arrangement are shown in Fig.3.

Tab.1 The principal dimensions

Tab.2 The size of anti-rolling tank(ART)

Tab.3 Parameters of two loading conditions

Fig.2 CFD model of PSV

Fig.3 Model of rectangle passive ART(2ZN)

Fig.4 Tank transverse cross-section plan
Despite the size and water depth in the tank,the baffles will significantly affect the roll angle reduction.The numbers,arrangement and the forms of baffles should all be well designed for the best effect.In this paper,only the influences of baffle numbers and water depth in tank are discussed.The design detail of baffle is part of our previous works and will be discussed in another article.So the next work is all based on the designed baffle and two kinds of baffle arrangement(2ZN and 3ZN).Water depth h’is with respect to the height of ART h(1/4h,1/2h and 3/4h).One of characteristics of PSV is the multi-working conditions,so there are two typical conditions selected in this work(full load and light load).Roll center at these two loading conditions and the filling level in ART are shown in Fig.4.

Fig.5 Roll moment of 2ZN and 3ZN with different water depths(T=1.63 s,φa =0.1 rad)
1.3.2 Simulation of roll moment
The time series of roll moments of tank are achieved by forced roll simulation.The following Figs.5~6 show the results of hydrodynamic force in tank with different water depths and numbers of baffles in full load condition.
The results show that water tank produces considerable roll moment and the effect of water depth in tank is significant.The damping coefficients for ship and tank can be achieved by curve fitting processing.Fig.7 shows one time history curve of roll moment MS(N·m,full load condition of ship model)and the corresponding fitted curve.
Fig.6 Free surface of 2ZN and 3ZN with different water depths,t=10T
The curve fitting is based on Least Squares method,and the test proves the feasibility of extracting coefficient from roll moment using this method.The following involves the specific processing step.
1.3.3 Hydrodynamic coefficients process
The forced rolling motion can be expressed as[11]:

Fig.7 Comparison of time history between simulation and coefficients fitting roll moment(ship,T=1.63s,φa =0.1 rad)

The roll moment of tank can be written as:

where fTis amplitude of the moment,ω is the frequency,ε44is the phase delay to the ship oscillation.The values can be obtained through monitoring the moment of the tank.Eq.(5)can be rewritten as:

where M4,μ,M4,Bare constants that can be determined with the least square method.Define the roll angle as φ=φasinωt and combine Eqs.(4)and(6),

The added mass and damping coefficient of the tank can be obtained:

Considering that the roll angle may be large at the resonance frequency,the nonlinear damping effect cannot be ignored.In order to predict the damping coefficient accurately,a lin-ear and cubic damping model is adopted in this work.Linear damping coefficient and cubic damping coefficient can be isolated with energy method,

where BTis the equivalent linear damping coefficient;B1is linear part;B3is the cubic part.The non-dimensional form is shown as:

Following the same process,two load conditions(full load and light load)of ship are also simulated,and the all non-dimensional coefficient results are shown in Tabs.4~5.

Tab.4 The non-dimensional damping coefficient

Tab.5 The roll moment coefficient results of ART
1.4 Rolling motion simulation
The added mass,damping coefficient and the roll moment amplitude ftof ART and the ship at resonant frequency are obtained with the method introduced above.The nonlinear restoring arm of ship can be expressed as below:

Restoring moment coefficients a3and a5can be obtained by fitting the righting arm curve,in which the loss of GM due to free surface effect is amended.
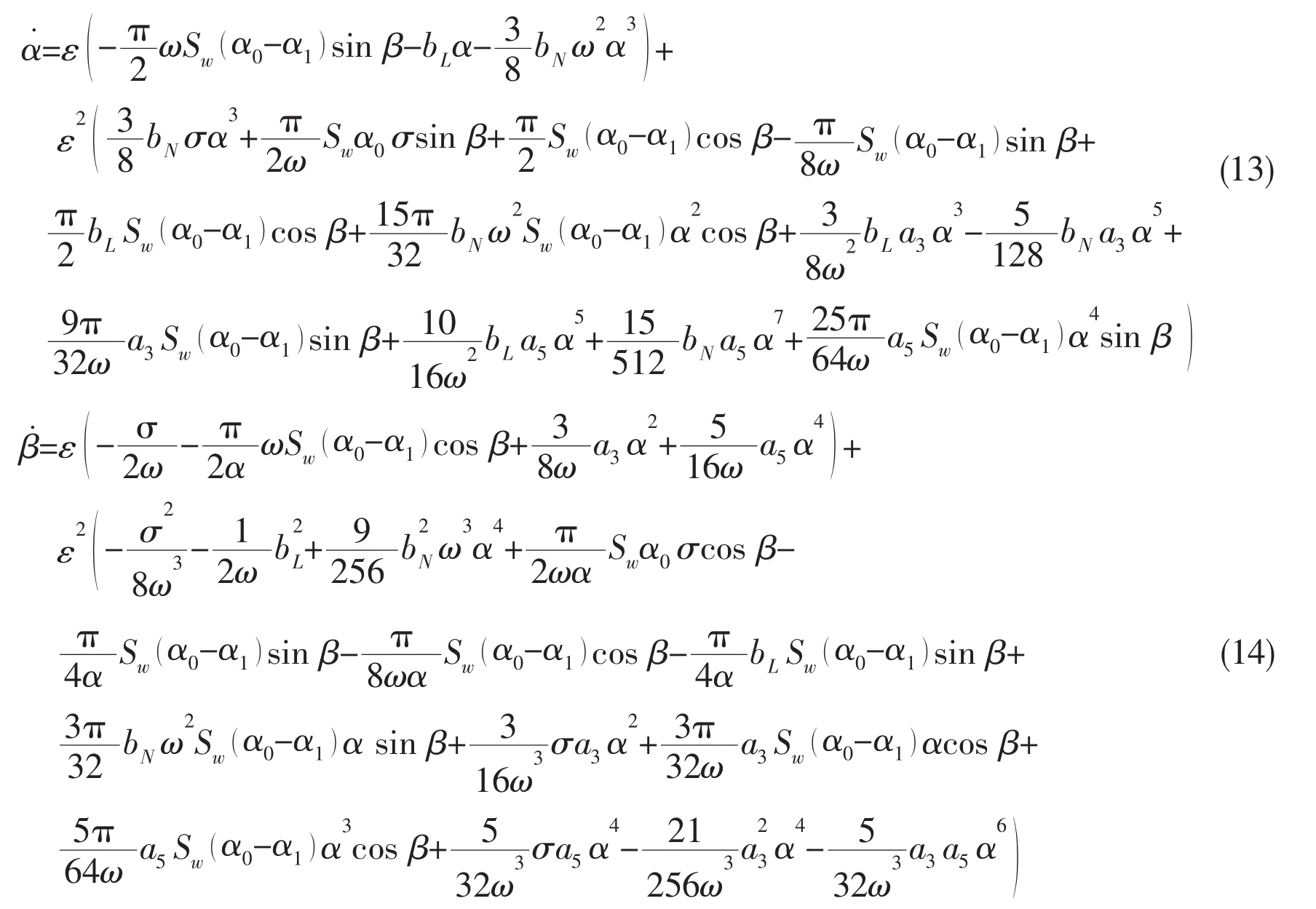
As for the solution of φ in Eq.(3),the multi-scale nonlinear dynamics method is applied[12].It is supposed that the additional inertia and damping coefficients are independent of the frequency[13],the φ is solved in an approximate analytical form as Eq.(12),more details about the asymptotic solution can be found in Refs.[14-15].


where bLis dimensionless coefficient of BL;bNis dimensionless coefficient of BN.CC is summation of conjugate complex of every item before.A andcan be written as:A=α+βi;=αβi.α and β can be determined by the following differential equation:
This multi-scale method is very efficient to analyze the autonomous motion system.The rolling motion of ship or ship with ARTs can be quickly predicted through this approximate analytic solution.
2 Experimental and numerical results
2.1 Experiments
Roll response model tests of PSV in regular beam wave were conducted at the Towing Tank of the Wuhan University of Technology.The dimension of the towing tank is 132 m×10.8 m×2 m.The wave height and period were monitored and recorded using a wave probe and associated monitor.The non-contact measuring instrument(Qualisys,Sweden)was used to capture real-time roll measurement,including roll angle,angle velocity and acceleration.Qualisys measure system is comprised of a number of infrared emitters strategically placed on the vessel.
Aimed to confirm the best anti-rolling effect,different combinations of water depth and baffle pattern in ART were designed.This is not discussed in detail here,but another paper we are writing will focus on this work.The model test results of different conditions will be shown in comparison with calculation results in the next section.

Fig.8 The model test of PSV with ART in beam wave
2.2 Approximate analytic solutions and model test comparison
Based on the above results,the frequency response curve of roll in beam wave can be obtained by theoretical calculation in different conditions.
(a)Results in the case of ship with empty tank,full load.
(b)Results in the case of ship with three damping plates and three-fourths water filling in tank,full load.

Fig.9 Rolling frequency response curve of full load(ship with empty tank)
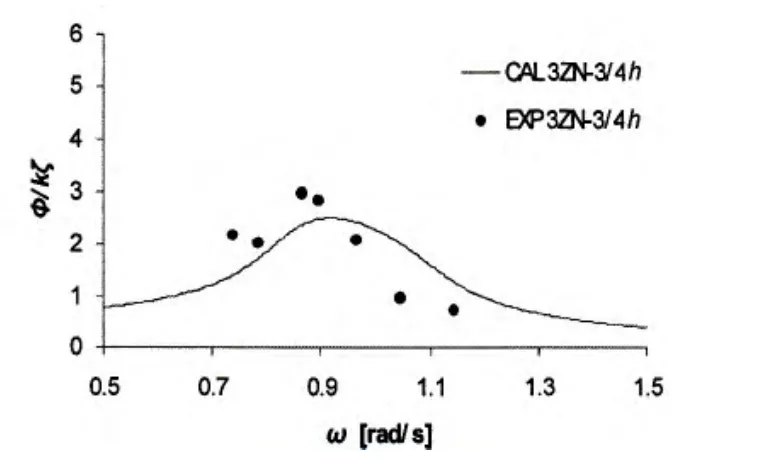
Fig.10 Rolling frequency response curve of full load(ship with 3zn-3/4h tank condition)
The result shows that the numerical method is appropriate to estimate the RAO curve especially near the peak frequency.In Fig.10,the discrepancy between numerical and experimental results occurs away from RAO peak area.This is probably caused by the assumption that hydrodynamic coefficients are irrelevant to frequency.As the peak value of RAO is more concerned,it is possible to judge the anti-rolling performance of the tank by this method.
(c)Comparison between ship with and without ART,at full load,in Fig.11.
(d)The test conditions of 3zn-3/4h may not include the best anti-rolling effect through the CFD simulation results.The results of more conditions are shown in Fig.12,full load.

Fig.11 Rolling frequency response curve of full load(comparison between empty tank and 3zn-3/4h tank conditions)

Fig.12 Rolling frequency response curve of full load(comparison with all tank condition)
From the comparison in Fig.11,the theoretical calculation displays the right roll reduction effect;42%reduction is expected at the maximum peak of curve.From the comparison in Fig.12,it can be found that the 2zn-3/4h produces the best roll reduction performance in all simulated conditions of at full load.
The results at light load are as follows:
(e)Results of light load without any tank,are shown in Fig.13.
(f)Results of light load with three baffles and water depth of half the tank height,are shown in Fig.14.
(g)Results of ship with two baffles and half water depth in tank,at light load,are shown in Fig.15.

Fig.13 Rolling frequency response curve(comparison of ship model without tank)

Fig.14 Rolling frequency response curve(comparison of ship with 3zn-1/2h tank condition)

Fig.15 Rolling frequency response(comparison of ship with 2zn-1/2h tank condition)
(h)Results comparison at light load with or without ART.
According to the comparisons above Figs.13-16,the numerical results correlate well with the test results.Both load conditions show that the effect of two baffles is better than that of three baffles;the best ART filling level depends on the loading condition,the best water depth for full load is three fourths of tank height and for light load is half of tank height.It is because when the natural rolling period of ship and the natural period of tank equal to each other,the roll reduction effect is maximized.As for the full load condition,the calculation result shows that the roll reduction with two damping plates and three fourths water filling is better than the other two test cases.

Fig.16 Rolling frequency response curve of light load(comparison for empty tank,3zn-1/2h and 2zn-1/2h tank conditions)
3 Further discussion
The prediction method introduced in this work is useful to solve the roll motion of ship with an ART,providing a powerful tool to assist the design of the tank including the opening form and arrangement of baffles and the size of the tank.From the safety point of view,the method is also helpful for ship owners to adjust the tank water level to gain the best performance of roll reduction.
According to Goodrich Method,the water depth h′can be preliminarily estimated by Eq.(15):

where ωTis frequency of ART;ωφis ship natural rolling frequency;h′is water depth in ART;B is ship breadth;g is acceleration of gravity.This formula can predict the water depth for the nonbaffle ART usefully,h′should be 3/4h under full load and 1/2h under light load,and the above results verify this relationship.But the influence of baffle in natural frequency of ART should be discussed.Take full loading condition as example shown in Fig.17.where,3/4h depth of ART should give best anti rolling performance through Goodrich Formula(5),however,the water depth is divided into more intervals near at 3/4h.Among the results of 5 water depths,the 70%h reveals the best anti-rolling effect.It should be added about 70%h depth in ART under full load,but not 3/4h.It indicates that the baffles affect not only the ART damping,but also the period of ART.So the appropriate water depth decided by empirical formula can be amended through this calculation method,and it will obtain a better anti-rolling effect.This also can be extended to all other loading conditions.Using the damping coefficient database based on a series of CFD simulations and quick motion prediction method,it is feasible to maximize the anti-rolling effect by changing the tank water volume.

Fig.17 Rolling frequency response curve of full load(comparison of ship with different water depth in tank)
4 Conclusions and future work
A method on how to reduce the ship roll motion with an ART is described in this paper.A way of combining RANS method and nonlinear dynamics method is applied.Based on some reasonable assumptions,the method is convenient and feasible to solve the damping effect of ship with ART and predict the roll RAO.The calculation results are in reasonable agreement with the model tests.The research discusses the influences of the number of baffles and the water height in tank.It is noticed that:
(1)The numbers of baffle will affect the roll reduction.The most suitable number and arrangement of baffle depend on the loading condition.
(2)Basically,the anti-rolling effect of passive ART is determined by the increase of roll damping.But the damping would increase the roll amplitude when the hydrodynamic moment caused by ART is in the same phase to the wave exciting moment.So,the study can be divided to two aspects,the first is to increase the roll moment and damping,and the second is to control the roll damping for positive effect.
(3)The water volume in tank can change the instantaneous frequency and the phase of roll moment of the tank.By investigating the water depth of ART and the numbers of baffles,a maximum of 65%decrease of roll angle of the platform supply vessel is achieved for light load and 42%for full load.This difference may be caused by different rolling center,and that the arm of rolling moment by ART of light load is larger than full load,so the anti-rolling effect of light load is better than full load.
(4)This work only refers to regular waves,but the irregular wave is more closer to the realistic seaway,it is feasible to apply RANS and nonlinear dynamic method in studying the anti-rolling tank in irregular waves and the work is in progress.
It is feasible to use the method in evaluation of anti-rolling effect of designed ART or baffle and adjusting the tank filling level real-timely.As for the other ship-tank coupling problems such as ballast tank safety,liquid cargo and flooded ship[16],the method can possibly be applied.The future works will not only focus on the hydrodynamics in ship resonance frequency but also on all the wave frequencies.
Acknowledgement
The authors gratefully acknowledge the support of the towing tank laboratory and Key Laboratory of High Performance Ship Technology of Ministry of Education at Wuhan University of Technology.
[1]Moaleji R,Greig A R.On the development of ship anti-roll tanks[J].Ocean Engineering,2007,34:103-121.
[2]Cheng ZhenBang,Liu Yingzhong.Principle of naval architecture[M].Shanghai:Shanghai Jiaotong University Press,2004:79-105.
[3]Ikeda Y,Himeno Y,Tanaka N.On eddy making component of roll damping force on naked hull[J].Journal of the Society of Naval Architects of Japan,1977,142:54-64.
[4]Ikeda Y.Prediction methods of roll damping of ships and their application to determine optimum stabilization devices[J].Marine Technology,2004,41(2):89-93.
[5]Yang Chunlei,Zhu Renchuan,Miao Guoping,et al.Numerical simulation of rolling for 3-D ship with forward speed and nonlinear damping analysis[J].Journal of Hydrodynamics,Ser.B,2013,25(1):148-155.
[6]Sayed M,Hamed Y S.Stability and response of a nonlinear coupled pitch-roll ship model under parametric and harmonic excitations[J].Nonlinear Dynamics,2011,64(3):207-220.
[7]Chai Wei,Fan Ju,Zhu Renchuan,et al.The nonlinear ship rolling and safe basins in irregular waves[J].Chinese Journal of Hydrodynamics,Ser.A,2013,28(4):431-437.
[8]Kim Y,Nam B W,Kim D W,et al.Study on coupling effects of ship motion and sloshing[J].Ocean Engineering,2007,34:2176-2187.
[9]Song Weihua,Ning Dezhi,Liu Yulong,et al.Numerical simulation of liquid sloshing in a container with baffles[J].Chinese Journal of Hydrodynamics,Ser.A,2012,27(1):54-61.
[10]Franeeseutto A,ArmenioV,La Roeea M.On the roll motion of a ship with partially filled unbaffled and baffled tanks:Numerieal and experimental investigation[C]//The Proeeedings of the Sixth ISOPE.Los Angeles,USA,1996(3):377-386.
[11]Luo Minli,Mao Xiaofei,Wang Xiaoxia.CFD based hydrodynamic coefficients calculation to forced motion of two-dimensional section[J].Chinese Journal of Hydrodynamics,Ser.A,2011,26(4):509-515.
[12]Hashimoto H,Umeda N,Matsuda A.Broaching prediction with nonlinear heel-induced hydrodynamic forces taken into account[C].Proceedings,STAB2003:571-582.
[13]Santos T A.Study of the nonlinear roll motion of fishing vessels in regular seas[C]//Proceedings of STAB’97.Varna,Bulgaria,1997:163-177.
[14]Ou Shan.The study of ship with nonlinear rolling in waves[D].Wuhan:Wuhan University of Technology,2010.
[15]Ou Shan,Mao X F.Theoretical and experimental research of fishing vessel in beam sea[C]//Proceeding of 21th ISOPE.Hawaii,USA,2011:495-501.
[16]Pu Jinyun,Zhang Weikang,Jin Tao.Melinikov’s method for non-liner rolling motions of a flooded ship[J].Journal of Hydrodynamics,Ser.B,2005,17(5):580-584.

- 船舶力學的其它文章
- Numerical Simulation of Strong Shock Wave Impacting on Water-elastic Solid Interface by Essentially Modified Ghost Fluid Method
- Study on Vortex Induced Characteristics of Four Square Columns at Different Spacing Ratio
- Study of Damping Ratio Identification for a Truss Spar Based on Continuous Wavelet Transform
- A Double-layer Depth-averaged Boussinesq Model for Water Wave
- Fatigue Strength Evaluation of Transverse Fillet Welded Joints Based on Notch Stress Strength Theory
- Measuring Stress Distributions of Composite Joints by Lock-In Infrared Thermography Technique