
Near minimum-time feedback attitude control with multiple saturation constraints for agile satellites
2016-11-23 06:12LiuXingdongXinXingLiZhenChenZhenShengYongzhi
CHINESE JOURNAL OF AERONAUTICS 2016年3期
Liu Xingdong,Xin Xing,Li Zhen,*,Chen Zhen,Sheng Yongzhi
aSchool of Automation,Beijing Institute of Technology,Beijing 100081,China
bNational Key Laboratory of Complex System Intelligent Control and Decision,Beijing Institute of Technology,Beijing 100081,China
Near minimum-time feedback attitude control with multiple saturation constraints for agile satellites
Liu Xiangdonga,b,Xin Xinga,Li Zhena,b,*,Chen Zhena,b,Sheng Yongzhia,b
aSchool of Automation,Beijing Institute of Technology,Beijing 100081,China
bNational Key Laboratory of Complex System Intelligent Control and Decision,Beijing Institute of Technology,Beijing 100081,China
Agile satellites are of importance in modern aerospace applications,but high mobility of the satellites may cause them vulnerable to saturation during attitude maneuvers due to limited rating of actuators.This paper proposes a near minimum-time feedback control law for the agile satellite attitude control system.The feedback controller is formed by specially designed cascaded sub-units.The rapid dynamic response of the modified Bang–Bang control logic achieves the near optimal property and ensures the non-saturation properties on three-axis.To improve the dynamic performance,a model reference control strategy is proposed,in which the on-line near optimal attitude maneuver path is generated by the cascade controller and is then tracked by a nonlinear back-stepping controller.Furthermore,the accuracy and the robustness of the control system are achieved by momentum-based on-line inertial identification.The rapid attitude maneuvering can be applied for tasks including the move to move case.Numerical simulations are conducted to verify the effectiveness of the proposed control strategy in terms of the saturation-free property and rapidness.
1.Introduction
With the development of the aerospace technology,satellite missions are becoming more and more complex.The demand growth for complex on-orbit missions lays a sophisticated requirement on the attitude control systems(ACS)for agile satellites in terms of high precision and stability.1
On the one hand,the improved guidance navigation and control(GNC)equipments can help to achieve a high pointing precision for high-resolution earth observation satellites with accuracy within 0.1°.For instance,the Pleiades HR-1A satellite equipped with high precision star sensor and optical fiber gyros can provide measuring resolutions in angular with 1′′(3σ)and angular velocity superior to 0.001(°)/s.2It utilized control momentum gyroscopes(CMGs)as major actuators,satisfying the minimum resolution in the moment up to 10 N.m,so that the high precision pointing was implemented within 0.017°(3σ).3
On the other hand,except high precision,the quickresponse of the ACS is of significance and is gaining widespread development.A series of optimal methods were developed and characterized by the minimum time and the minimum fuel consumption features.4Recently,since the CMGs have been widely installed instead of reaction wheel actuators,World View-2 satellite has the quick response.Its maneuvering angular velocity is up to 4.5(°)/s and the acceleration at 2.5(°)/s2.5,6The Pleiades HR-1A can also accomplish an attitude maneuvering of 5°in 7 s,or 60°in 25 s.2It is obvious that the advantages of the agility can effectively expand the imaging range of the earth observation satellite and provide on-board task modes with more flexibility.7
However,the enhanced flexibility above is accompanied with some problematic issues.First,the substantially fast maneuvering angular velocity may easily result in severe saturation due to the limited ratings of both actuators and sensors,and the internal disturbances from the gyroscopic coupling as well as parametric uncertainties.8Furthermore,modern satellites are often equipped with low rigid accessories or carries either large antenna or solar cells.9In the case that they undertake the overlarge rotational acceleration,a persistent vibration may be caused,which even deteriorates the attitude stability and degrades the performance of some high precision payloads and sensors.10
To overcome the saturation problem,several improvements have been proposed as remedies to the conventional feedback controllers against the stated over-speed problem.They usually adopted nonlinear characteristics in the feedback controller design,e.g.,the PD+based quaternion feedback controller with exponential growing gains and angular velocity estimating functions,11and the unsaturated feedback controller,12which is composed of a nonlinear proportional control term and a dynamic angular velocity with strictly positive real property.
The anti-windup control is the other kind of approach focusing on the stabilization of the linear saturated system.13The linear matrix inequality(LMI)-based methods were proposed for the attitude control to compensate the integral errors caused by actuator saturation.14,15In view of the practical fact that the velocity-free feedback control is subject to torque magnitude and rate-saturation limits,Akella et al.16designed an anti-windup controller constituted by hyperbolic trigonometric functions and passivity-based filter.Walls grove and Akella17developed a variable structure controller containing hyperbolic tangent functions,which is robust against disturbances with unknown upper bound and can provide strict amplitude limits on the generated control torque.Bang et al.18proposed a new PID controller with mode switching functions,where the anti-windup method was utilized for the compensation in the control law against the saturation of the reaction wheels.Ali et al.19used saturation functions to constitute the virtual control law of the second-order back-stepping controller,implementing the speed restriction with the bounded control torque.Based on the actual dynamics of flywheels,
Tian and Xu20formulated a variable input saturation model and pointedly provided an unsaturation feedback controller to guarantee the stability and fluency of the control process.
However,the efforts above focused only on the stability and ignored the quick response of the saturation problem.In fact,both stability and quick response should be guaranteed for agile satellites.8,21Moreover,some progresses have been made on vibration suppression techniques during rapid attitude maneuver.22Therefore,besides stability,there exists much more potential for the ACS to improve its dynamical capability.Relative research has been made such as Lyapunov finite-time convergence theory and terminal sliding mode control methods.23–26By taking the saturation problems into account,the control design was generally regarded as the time optimal(or the near optimal)control under linear constraints.Particularly,the minimum-/near-minimum-time maneuvers can be equivalent to a Bang–Bang or Bang-Off-Bang motion process for the Rest to Rest(R2R)case.27Targeted at this issue,several algorithms for the near-minimum-time attitude control problem have been further proposed.8,27Wie and Lu27applied the cascade-saturation control method for the R2R maneuvers,in which the near-minimum-time rotation along the Eigenaxis was implemented with the overall saturation-free process.
In the cases of Rest to Move(R2M)and Move to Move(M2M),the saturation constraints were determined by the actual slew rate instead of the relative slew rate adopted in Ref.28Furthermore,the problem of Eigenaxis and R2R rotation were addressed by a relatively low slew rate in Ref.26,where the 2-layer cascade controller in a simple linear PD form can guarantee stabilities and dynamic responses be similar to the ideal cases noted in Ref.29However,it becomes much more complicated to design a M2M cascade saturation or backstepping controller with the cascade orders higher than 2.Thus,it is difficult to apply the attitude tracking control without a working mode switching,and such a drawback limits the practical efficiency of the measuring instruments and actuators.
To further ensure the static robust stability and the constrained optimal dynamic performance at the same time,the design is decoupled,and the saturation-free attitude maneuver trajectory is pre-generated by optimal functions and is then tracked by a closed-loop controller.8,30Many studies have been reported on how to deal with the attitude planning based on the pseudo-spectrum31and the inverse dynamics in the virtual domain(IDVD)approaches.32In spite of the significant progresses on computational efficiency,the pseudo-spectrum and the IDVD methods still lay heavy burdens on on-board computers in practice,especially for small-scale satellites limited by on-board resources.Data uploading through the space-to-ground communication can be applied as an alternative solution,33but it is still restricted by the communication window problem.
In this paper,an improved near minimum-time control method is developed based on the feedback control in order to enhance the quick-response of agile satellites.Targeted at the M2M and the multiple constraint problems,a nonlinear PD+controller is designed upon a multiple-order cascade structure,so as to achieve rapid and saturation-free attitude maneuvering on all three-axis.To obtain more accurate planning path and robust control performance,a momentum-based estimation algorithm is proposed to identify the uncertain inertial parameters on-line.
The remaining paper is organized as follows.Section 2 clearly presents the cascaded properties of the control system and its corresponding mathematical modeling,based on which the general cascaded attitude control model is derived.Section 3 provides the theoretical proof works for closed-loop stability of the cascade system in a general view,and then proposes the cascaded control within near minimum-time,in which the cascade control is calculated by a unique projection matrix,so that the magnitude can be properly determined.It achieves the rapid convergence performance and significantly reduces the saturation in multiple orders of the system states.In Section 4,a near minimum-time control method with multiple constraints for attitude maneuver is established.Such near-optimal control law applies a model reference attitude control logic,where the ideal reference trajectory is tracked by a nonlinear back-stepping controller with the improved closed-loop tracking performance.Numerical simulations in Section 5 verify the effectiveness of the proposed strategies by considering the scenarios of the large-angle maneuvering.Finally,Section 6 concludes the paper.
2.Preliminary
To facilitate further detailed analysis,the control problem of the cascade system under investigation will be briefly reviewed.The mathematical models are provided,including a general system and the rigid body satellite attitude control system consisting of the cascade system.
2.1.Cascaded characteristics of control system
The complex control systems are generally characterized by the cascaded features,in which the dynamics between any two adjacent states can be formulated as nonlinear differential equations.The multiple-integrator system is the simplest example of the cascade systems of interest.In this case,the constraints on the system state are decoupled,and the general form of the cascade controller is obtained as follows:26,28
where x∈RnX1is the state vector; Pi, Ri∈RnXn(i=1,2,...,m)are the feedback matrices;x(m)represents the mth derivative of state x;?aigt;0(i=1,2,...,m)in Eq.(1)and agt;0 in Eq.(2)are the saturation boundaries.
In the case that the control input u=x(m)and the destination of x≡0nof arbitrary order,the stability of the linear states x,x(1),...,x(m-1)→0nfor such cascade system has been investigated.28
This paper proposes a new form of cascaded control law for a more complicated system with nonlinear dynamics,input couplings and time-variable targets.Such issues are common in rapid agile satellite control problems and were not systematically taken into consideration in Ref.27 More importantly,the constraints of the system states are defined instead of the vector norm so that the constrained control provides more practical significance for the ACS system.
This proposed method develops the controller with a chain of cascaded units,which is similar to the back-stepping controller widely applied in the cascaded system.18Particularly,each cascade sub-unit of the new cascade saturation controller is written as

where uiis the ith order sub-control term of the Nth order cascade control u=uN.Ui(.)is the function of ui-1and xi.
Note that there is only one state xiin x=[x1,x2,...,xN]Tthat is used and thus distinguished from Ref.18,so that uiis formed more independently for the near-optimal feature as in Ref.26Nevertheless,the back-stepping method provides strict constraints on the non-saturated properties,and is more suitable for the cases when the near-optimal control is not principal.
2.2.Generic mathematical description
Considering the general nonlinear system SN(x,u)with controllability and the following cascade characteristics as

where xi(t)∈Rnis the cascade state variable while u=uN=xN+1∈Rnis the control input.
It is quite common in the motion control system that the input term gi(xi,xi+1)in Eq.(4)holds the homogeneity for the cascade input xi+1,according to which Eq.(4)is then simplified with.

Furthermore,let fi(.)in Eq.(4)satisfy the following properties,

For the error tracking problem addressed in this paper,the system error is defined as xe,1=x1-XD,where XDis the expectation of x1.Therefore,the tracking error of the ith sub-control term uidesigned in Eq.(3)is defined as

Let xe,i≡0n,the expectationfor each state associated with XD(t)can be determined simply byas


For an arbitrary variable set y={y1,y2,...,yN},the operatoris de fined as

By considering the time-varying sequencesthe symbolsandare used in this paper to represent the inequalities,2,...,N;j=1,2,...,n),andj=1,2,...,n)respectively,where?mi,jgt;0 is the magnitude constraint of yi,j;t0is the initial time.
With the definition above,the saturation limitation of SN(x,u)can be represented as

with i=1,2,...,N and xN+1=uN.
Nevertheless,the cascaded control law studied in both Ref.8and this paper only adopts the relationship of Eq.(9)instead of Eq.(8).

Since ui=xe,i+1+xi+1,Eqs.(8)and(9)will become equivalent if xe,i→0n.This relationship will be discussed later.
2.3.Satellite attitude control model
With the dynamics,kinematics and its higher order differential equations of motion under consideration,the satellite attitude control system is generally regarded as a typical cascade control system.Although it is previously formulated in a generic form,the control method proposed in this paper is primarily designed for the rapid attitude maneuvering control.By considering the modeling in Refs.33,34,the closed-loop dynamics equations for the attitude control system is represented as follows:

where J∈R3X3is the inertia tensor of the spacecraft represented in the body-fixed frame Fb,containing all mass tensors generated by the locked structures and actuators,and the mass effect caused by the mass unbalance of the heavy assemblies;is the slew rate of the spacecraft represented in Fb,with ωithe absolute angular velocity,and˙ω the derivative of ω.Similar superscripts are used throughout this paper to denote the coordinate;ωX∈R3X3is the anti-symmetric matrix of ω;ωd∈ R3X1is the target slew rate represented in the target body frame Fd;ωerepresents the tracking error between ω and ωd,i.e.,

In this paper,the quaternion is used to analyze and design the attitude control system.Therefore,the kinematics of the system can be represented by

Due to the differential relations among qe,v,ωe,TCand˙TC,the attitude control system is a typical cascade control system.As noted previously,the magnitude of the slew rate ω and the control torque TCare under restriction in all three-axis according to the saturation characteristics of the sensors and actuators equipped.Besides,for those momentum controlled systems,˙TCrepresents the bandwidth of the wheel or CMG and is also restricted in practice.
3.Theorems and proofs
3.1.Closed-loop stability of cascaded control
In this section,the stability of the cascade system will be discussed by neglecting the saturation.This stability problem of the linear systems has been extensively studied in previous works.28Similar conclusions can be applied to Eq.(4)as follows.
Theorem 1.The closed-loop system SN(x,u)is asymptotically stable if the following cascaded control law u=uNis employed by

with u0=XD.Ki=diag(ki,1,ki,2,...,ki,n)gt;0 is the linear feedback matrix for?i∈ [1,N].
Proof.Choose the Lyapunov function as


The stability of Eq.(13)is particularly effective if the conveyance of xe,i+1is designed faster than that of xe,i.Similar designs are widely applied in the cascade control systems,for instance,the cascade discontinuous controller used in Ref.36to deal with the actuator failure.
3.2.Saturation problem of cascade system
By considering Eqs.(4)and(13),the closed-loop dynamics of the cascade control system can be formulated by

As xe,i≡0n,we haveTherefore,the steady state of SN(x,u)provides x1≡XDand xi≡ui-1for any i∈[1,N].
Apparently,the unsaturated control is valid only when the tracking destination XDsatis fies(i=1,2,...,N).
For the unsaturated functions can satisfy Eq.(8),these function spaces can be denoted as SR,and then XD∈SRbecomes a necessary condition for the saturation-free control.Furthermore,if we consider the continuity of Eqs.(4)and(13),and use the norm ‖.‖with the zero element yz(t)≡0nto define the distance between ya,yb∈SRas

where ya,jand yb,jare the j th components of yaand yb,respectively.It can be verified that there exists the continuous closed convex set SA?SRaround the origin yz(t)≡0n.
On the other hand,if K1,K2,...,KNare predefined,Eq.(13)can be rewritten as

where,

This paper only considers the system which uses feedback control without global planning.Therefore,there always exists the conservative control when K1,K2,...,KNis properly small to drive the system state x to converge towardsAssume that a generalized state transition process between ya,yb∈SAis under consideration,the following limitations are satisfied,

Eqs.(18)and(19)indicate that the effects of fi(xi)and XDin Eq.(16)are relatively small in those cases that may appear in practice,and the saturation of uiis normally caused by the feedback termTherefore,there always exist ya,yband K1,K2,...,KNsmall enough to satisfy Eq.(8).
Note that if the multiple-integrator system with fi(xi)=0 and bi(xi)=I3is considered,the condition of Eqs.(18)and(19)can be accordingly simpli fied to

Eq.(20)is previously defined as the necessary condition of the saturation-free control,which indicates that the saturation free control can be always guaranteed for?xiin multiple integrator systems.
Similarly,for a weakly nonlinear system,in which the cascade dynamics models can be approximately treated as multiple integrators,it is ensured there exists a limited varying range for xiwith unsaturated property of Eqs.(18)and(19).Hence,this system has similar dynamics as the global non-saturation one.If such unsaturated range completely contains the variations of xiunder practical situations,this system is considered to be able to globally satisfy Eqs.(18)and (19)isthen referred as the quasi no saturation system in the paper.
3.3.Cascaded control within near minimum-time
Based on the assumption in Section 3.2,this section proposes an improved cascade control method to implement the near minimum-time control.The quasi no-saturation system is considered here to be able to satisfy Eqs.(18)and(19).
Eq.(21)represents the concrete form of the saturation cascade control law proposed in this paper.


where,Hi∈(Rn,Rn)→Rnis the nonlinear feedback term to bedesigned;and(-Kixe,i).
Note that Eq.(21)can be obtained from Eq.(13)by considering the simpli fied giin Eq.(5),and the resultant feedback termis replaced by Hiwhen the saturation control can satisfy Eq.(9).Ifin Eq.(22)can be determined by the following nonlinear planning(NLP)of Eq.(23).

in which the constraints of Eqs.(24)and(25)are considered,

To satisfy Eq.(9),the condition for Eq.(24)is built for ui,and Eq.(25)represents the negative definiteness of di.Minimizing Eq.(23)makes Hi=siwhensatisfying both Eqs.(24)and(25).
It is obvious that the solvability of Eq.(23)cannot be always guaranteed under the constraints of Eqs.(24)and(25).For the unexpected cases,some conditions in Eq.(25)may be neglected in order to obtain the solution of nonnegative definite di.However,for practical applications,it is inefficient to process the NLP in the feedback controller.Therefore,the boundary conditions are used in this paper to approximately compute di,so as to improve the real-time performance.
Without loss of generality,let dibe represented by

The condition of Eq.(25)is used to guarantee the stability of the control law.However,Eq.(25)is not involved in the following simplified process,and will be approximately considered in other ways as a compensation.Thus,can be further calculated as



?h∈Sh(1≤h≤n)is one of those row indexes.μi,kis properly placed in the array si+riwith the order shown in Eq.(28).We can use Eq.(29)to calculate^di,where εi∈ Rn-sis a compensation factor and can be determined as follows.
First,in the case of

By substituting Eq.(29)into Eq.(27),

Let ker Qidenote the null space of Qi,which satisfies Qiy=0 for?y∈Rn.Besides,by the previous definition,any non-zero component ofin Eq.(31)holds the boundary value of mi,jas in Eq.(9).Hence,Ωistands for the projection component of the error vector between-Kixe,iandalong the diction of ker Qi,which makes dias close as possible to the original feedback ker Qiprovided in Eq.(13)under the constraints of Eq.(24).Note that the effect of Eq.(25)is roughly neglected as we use the projection to approximately make dicloseUnder this circumstancecan be guaranteed according to the stability of Eq.(13).
SinceQiandare fully ranked according to rank,there exist Υ∈kerQiandwhere Υ belongs to QiandˉΥ toˉQi,and(kerQi)⊥is the orthogonal complementary space of kerQi.Hence,Eq.(31)can be rewritten as

It can be verified that,

Eq.(32),it can be rewritten as

The computations of Eqs.(27)and(29)are used to replace Eq.(23)by the NLP,and the approximate result is obtained from a specific projection matrix represented by Eq.(27).This algorithm is shown in Fig.1,where the orthogonal relationship between ker Qiand(kerQi)⊥is illustrated in 2D plane.siin Fig.1 is decomposed into components,in which the saturated componentsis positioned exactly at the critical saturation value, and the error generated byis firstly mapped intoand then projected into the null space of Qi.Accordingly,the generated vector is mapped back into Hiwith,and will be compensated with εigt;0 if necessary.As the projection is the maximum approximation of the original vector along a specific direction,is approximately considered as close as tounder the saturation constraints.
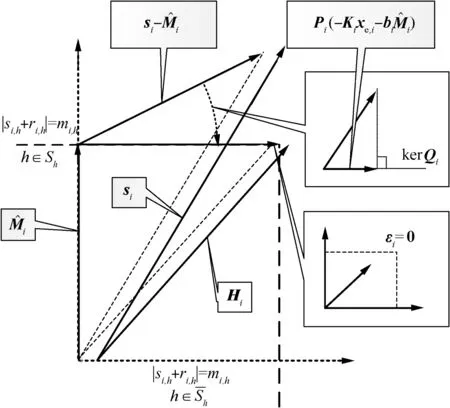
Fig.1 Principle diagram of projection algorithm.
Discussion1.The computation of Hi+riby Eq.(22)is continuous for si+riby Eq.(13)at the critical condition ofSuppose a specific row index s,so thatfor h≤s andfor hgt;s,and we have in whichandfor h≤s is utilized to accordingly lead to εi=0 in Eq.(31).Therefore,the continuity of Eq.(27)makes the control term Eq.(22)equivalent to that of Eq.(13)when the amplitude of uiis small,and the switching from Eq.(22)to Eq.(13)is smooth.
Discussion 2.uiin Eq.(22)may behave three types of dynamic performances to affect the stability ofIfand there will always exist Sh=?and Hi(ri,si)=si.In this case,Eq.(13)is equivalent to Eq.(22)with the asymptotic stability and saturation-free,which is called as linear phase in this paper.Besides,indicatesandConsidering the Lyapunov function used in Theorem 1 under the condition ofthere exists

Discussion 3.By considering Discussions 1 and 2,we know that the coasting phase and instability phase will occur only when there exists at least one component of uifor|ri,j+si,j|gt;mi,j.Even if uiis undergoing a coasting or instability dynamics,there may still exist the linear stable xe,(i,j)if at least one component of uisatisfies
However,there exists the specific systems in which bi(xi)can be simplified into a diagonal matrix.As a result,
In this case,Eq.(27)can be simplified into
3.4.Stability of saturated system
In this section,it is assumed that the instability phase dynamics occurs in ui,jat moment t1,but will never occur in any uk,jfor kgt;i and tgt;t1. Due to the convergence ofaccording to the Lyapunov stability theorem,xi+1is considered to be able to satisfyfor a proper tgt;t1.Hence,the dynamics of the stable states xi+2,xi+3,...,xNafterwards are neglected in the following discussions.
Consider the virtual cascade control terms~u1,~u2,...,~uNcorresponding to u1,u2,...,uN,in which~uiadopts the following characteristics,


The closed loop system with~uNbeing employed is represented bywhereis the state controlled byEven if the saturation is simplified by Eq.(34),the dynamic ofis still complicated because of the coupling nonlinearity in gi(xi,ui),so that the regular analytical stability proof is hard to achieve as noted in Ref.17However,the simplification is feasible for several practical applications,including the satellite attitude control case of interest,so that the analysis and synthesis of SN(x,u)can be accordingly provided as follows.
Theorem 2.There existandwhich can guarantee that the quasi no-saturation system SN(x,u)with the initial state x(t0)∈SV,XD∈SAwill be asymptotically stable by Eq.(21),if SN(x,u)with its reference systemsatisfies one of the following cases.
(1)There exists only one specific term~uiamong u1,u2,...,uNwith its component possibly encountering the instability phase dynamics,and bi(~xi)satisfies,in whichis the jth row ofare scalar constants,satisfyingfor any j=1,2,...,n.

(2)For?k=h,h+1,...,i in which the instability phase ofmay occur,are all constant diagonal matrices. Meanwhile, for?k=h,h+1,...,i,fk(xk)satisfies,

Proof 1.In Case(1)of single instability,assuming there exists no status switching ofbetween the three types of dynamics as noted in Discussion 2,for the unstable control term,there exists

Similar to Eq.(14),by considering the Lyapunov functionit can be obtained that

According to Eq.(36),there exists


Proof 2.In Case 2,the situation in which multiple instabilities occur in different uhwill be discussed.Without loss of generality,another instabilities except uiare denoted as uh(0lt;hlt;i),and there would occur no more instabilities in all uk(hlt;klt;i).For one saturated component uh,j,it is obtained,

and the closed loop dynamic ofis decoupled as follows becausis a diagonal matrix.


Discussion 4.As noted above,Eq.(21)can be stabilized providing ui?{mi,j}.However,the saturation control is generally expected to implement Eq.(8)instead.Although Eq.(21)does not hold such strict non-saturation property,for these practical xe(t0)and xi(t0),Eq.(8)is still guaranteed under some reasonable assumptions.
For most cases,the system state xiis asymptotically stable so as to converge towards the limited ui-1.It is obvious that ximost likely exceeds the limitation when ui-1gets close to its magnitude boundary mi,jand then instantaneously loses its stability on account of the existence of the higher-order tracking errorDue to the uncertain variations in xe,iduring this time,ximay go beyond its limitation as there existsTo deal with such problem,the movement of the cascaded controller withis supposed to satisfy the properties of Eqs.(42)and(43).
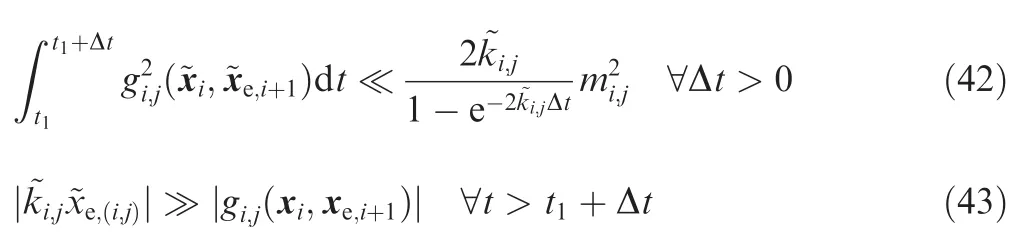
where gi,j(xi,xe,i+1)is the jth component of
Eqs.(42)and(43)indicate that the convergence ofto the equilibrium state is always relatively faster than that ofTherefore,the effect caused by xe,i+1as in Eq.(42)is negligible.Sinceassuming that the dynamic relationship between~xe,iand xiis omitted and bi(xi)is considered as a time variable,the solution for Eq.(15)can be derived as follows within a relatively short time,

By taking Eq.(42)and the Cauchy–Schwarz Inequality into consideration,and utilizing the following inequalities,

the relationship about Oe,(i,j)(t,t1)can be obtained as
In view of the dynamic process,in which xi,j(t)has been stabilized toby a coasting dynamics,and then turns into a transient state thatholds,the following relationships is derived as


On the other hand,from Eq.(43),the approximate relationship of Eq.(47)can be obtained,

By substituting Eq.(47)into Eq.(44),we can get

Then,the following relationship is derived from Eq.(48),

With the results from Eqs.(47)and(49),|xi,j|≤mi,jcan be obtained in a non-strict manner.
4.Attitude control system design
This section will present the ACS design with the proposed cascade control method.The ACS has the following potential advantages to be integrated by the cascade control.First,in general applications,the relative attitude movement has a relatively lower speed than the mobility of the satellite,and the dynamic performance similar to that in the rest state has weak nonlinearity.26Although the cascade methods have been applied in Refs.26,28,there still exists a large enough space of SAto perform the attitude maneuvers in view of practical feasibilities by considering Eq.(20).
Second,the boundary of SVand SF,kare large enough due to the powerful output of the agile satellite ACS.Although it is still difficult to analytically determine the region of SVand SF,k,the feasibility of the control law with predefined parameters can be verified by numerical simulations for the large angle maneuver with the extreme displacement as done in Ref.17
Thirdly,the ACS system satisfies Case(2)of Theorem 2.
4.1.Near optimal attitude planning
In terms of the stability,the dynamics and the non-saturated property of Eq.(20)are interdependent.The model reference control is utilized to improve the performance of the cascaded control law.In such a control system,an ideal reference object is introduced and controlled by Eq.(20)as a planning.There will be a triggered update logic involved whenever the closed-loop controller cannot keep tracking the planning due to the uncertainties.
The referenced rigid body satellite attitude control system are represented in Fbframe as follows:



where kugt;0 is a constant scalar;and TEcan be generated by magnetic moments as noted in Ref.37Even if the angular momentum unloading is not achieved precisely,the attitude programming is still accessible.However,the disadvantage is that there may be additional error involved.
By replacing xiwith the reference statesand,and considering the maneuvering targets qdand ωd,a three-order cascade controller is developed according to Eqs.(22)and(52).The cascade attitude controller terms u1,u2and u=u3are formulated as

with

Since ωdis a small quantity compared with the orbit movement of the satellite,u1will never get to the instability phase dynamics.The inertial matrix J in practice is an almost constant diagonal matrix.Therefore,the reference control system satisfies Case(2)in Theorem 2.
4.2.Nonlinear attitude tracking control
In order to implement the remaining error tracking control for the previously programmed reference attitude~qv,a nonlinear back-stepping control law is proposed and demonstrated in detail.
The following kinematic control law is firstly proposed to perform the closed-loop tracking of the kinematic equation of

The dynamic tracking control law is further designed as


To verify the asymptotic stability of Eq.(58),consider the Lyapunov functionand we could get its differentiation as By substituting both Eqs.(57)and(58)into Eq.(60)and neglecting the relatively small amountODand TD,Eq.(60)turns into


As αqe,vis the function of qe,v, there existsand the upper bound of|z|is unlimited.Considering the continuity of qe,vand z,it can be ensured that the movement of qe,vhas the equilibrium point as Eq.(62)according to the Lyapunov stability theory.


Considering the equilibrium dynamics of Eq.(62),Eq.(63)can be rewritten as

Therefore,the asymptotic stability has been proven by Eq.(64).
4.3.Dynamic performance design
The attitude tracking control law has been designed based on the back-stepping logic in Section 4.2.Nevertheless,the dynamic performance of the feedback controller is dependent on several undetermined constants or variable parameters.To ensure that the programmed near-optimal trajectory is tracked rapidly without overshoot,the close-loop performance of the back-stepping control is specifically parameterized by a system linearization in this part.Based on this,the attitude control system is improved in terms of its practical implementation and reliability.
First,the close-loop system is considered with a large attitude error providing qe,0? 1 and α ≈ α0cmin.By substituting Eqs.(57)and(58)into Eq.(10),it is obtained that

The kinematic tracking performance indicted by qeand the dynamic tracking performance indicted by z are designed.To exclude the feedback effect from the attitude error qe,let cmin=0 in Eq.(65)temporarily,and then the solution of the differential equation can be represented as

Thereby,β0can be treated as a time constant,on which the convergence of z is dependent.
To design the dynamic performance of the close-loop system,let the almost stable state withandDue towe haveandThus, the following linearized differential equation of Eq.(67)can be obtained by substituting Eqs.(57)and(58)into Eq.(10).


Finally,α0can be determined by considering the following second-order system dynamics as

where ξ is the damping ratio as the rate of convergence;ωnis the natural angular frequency,on which the overshoot and the accommodation time are mainly dependent.
To obtain an ideal dynamic performance with rapidity and robustness,ξ→1 is preferred in view of the engineering experience,and α0can thus be parameterized by

Particularly,since the attitude maneuver has been optimized into a small angle error tracking process towards the programmed trajectory,the linearization represented by Eq.(67)holds globally.
4.4.Identification of spacecraft inertia tensor
The model reference control method proposed in Sections 4.1 and 4.2 is assumed accurate with the explicitly determined inertial parameter J in Eq.(10).Nevertheless,the value of J cannot be precisely acquired in most cases,and even may be changeable during the on-orbit task.Obviously,the uncertainties of J can bring in errors between the preferred near-optimal trajectory and the physical attitude movement.To overcome this disadvantage,an inertial parameter identification method is proposed in this subsection,in which the CMGs or reaction wheels based ACS are under consideration.
Here,the momentum-based inertial identification method is preferable because it only requires the velocity measurements and is less susceptible to signal noises.38Similar parameter identification algorithms were developed in the space robotic arm systems.34,38The following angular momentum conservation relationship is considered and represented in Fi,

Note that since the effect of TDis relatively weak,TEis not always prerequisite for the momentum unloading.Assume a small time offsetforandis neglected.The following observation function of Eq.(72)can be formulated by modifying Eq.(71),with


Considering the time sequence t0,t1,...,tk,Eq.(72)can be constructed as

where

The following least squares(LS)cost function of Eq.(74)is then applied,

Therefore,the LS estimation is formulated as

As a result,the inertial tensor J in Eqs.(53),(54)and(58)can be replaced by the estimated value of θkwith more accurate planning and more robust tracking control.
4.5.Real time computation
Since the reference model dynamic represented by Eqs.(50)-(52)entirely depends on the real time states,the execution of the planning can be obtained by applying numerical integrations from t=t0,which means that the trajectory planning is synchronized with the feedback based control calculation at every time step t≥t0,and the initial referenced model states at t=t0can be updated on line by externally resetting the integration states in Eqs.(50)-(52)to the current values of the practical attitude system.
The triggering condition of the model updating mechanism is defined by
5.Numerical simulations
This section verifies the control strategy for an on-orbit task simulation.A typical agile small satellite in the sun synchronous orbit is under investigation and this satellite is equipped with the star sensor and the CMGs,so that the attitude movement is under restriction.The specifications of the satellite and its actuators can refer to Ref.39
Note that the CMGs in the simulation are constrained with a slight delay inertial and controlled by a conventional robust inverse steering law.40Since the momentum of the CMGs is large enough to perform the rapid attitude maneuver,the influence of the control error generated by the singularity avoidance is inconspicuous and is not specially shown in the results.Furthermore,the requested zero-momentum condition in Eq.(53)is assumed to be fulfilled before the programming starts.
5.1.General attitude maneuvers performance
First,the satellite model simulated by Eq.(10)is commanded to execute a large angle maneuvering from a random attitude to the staring-imaging mode(the eigenaxis rotation angle to the destination is larger than 97.6°at t=0 s).In this part,the feedback control method proposed in Section 4.2 is applied in a conventional way(i.e.,without pre-programming),so that the close-loop performance of the proposed method can be verified independently. A feedback controller withand β0=2 are chosen,and the inertial identification is activated in advance and has already reached the stable state at t=0 s.
The close-loop response is shown in Fig.2,where the attitude error qe,vis represented in Euler-angle of ψ/θ/φ in the yaw/pitch/roll sequence, and it holds.The control torque generated by the controller is also shown in Fig.3,where TC=[TC,1,TC,2,TC,3]T.
The simulation results indicate that the back-stepping controller with nonlinear feedback properties can effectively restrict the attitude tracking velocity.By contrast,the commonly used back-stepping controller with a linear feedback as α≡ α0cannot stabilize such rapid response system under the same control parameters(not shown in the paper).However,the slew rate saturation is dramatically eliminated at the cost of the attitude response time,which is close to 52 s identified in the case when three-axis error is less than 0.1°and 0.005(°)/s.Besides,the generated control torque still has peak values,which may result in serious saturation problem in practice.
5.2.Improved attitude maneuvers performance
The model reference method proposed in Section 4.1 is used in this part to verify the improvement of the rapid system response and the prevention of saturation.The controller setting and the attitude maneuver undertaken are exactly the same as those in the previous part.However,for the purpose of avoiding saturations of both sensors and actuators,the movement constraints during the attitude maneuver is adopted when the model reference based attitude programming is performed,and the programmed trajectories ofandare shown in Fig.4.

Fig.2 Conventional close-loop response of attitude maneuver.

Fig.3 Control torque generated by conventional controller.
The maneuver is finished within 43 s and then smoothly turns into an earth-stabilized mode in a slowly varying orbit angular velocity.Note thatandare bounded in three axis,which means the attitude control system will not encounter the saturation problem if the programed maneuver trajectory can be closed loop tracked,and the maneuverability of the agile satellite is fully developed.
Fig.5 represents the attitude maneuver error of the satellite towards the ground target.Meanwhile,Fig.6 represents the tracking error towards the programmed attitude,in which the tracking error is maintained within the range of 0.06–0.07(°)/s.
Note that the attitude planning function is disabled whenever the system has achieved the high accuracy and stability(i.e.,three-axis error is less than 0.01°and 0.01(°)/s,and t≈52 s).It can be seen that the feedback controller still maintains fast tracking capability.The control torque TCprovided by the closed loop controller is also shown in Fig.7.Compared with that in Fig.3,TChas smaller overshoot,which is caused by the modeling error between the reference model and the practical system.However,the magnitude of TCremains limited according to the programmed~TC.

Fig.4 Programmed attitude maneuver.
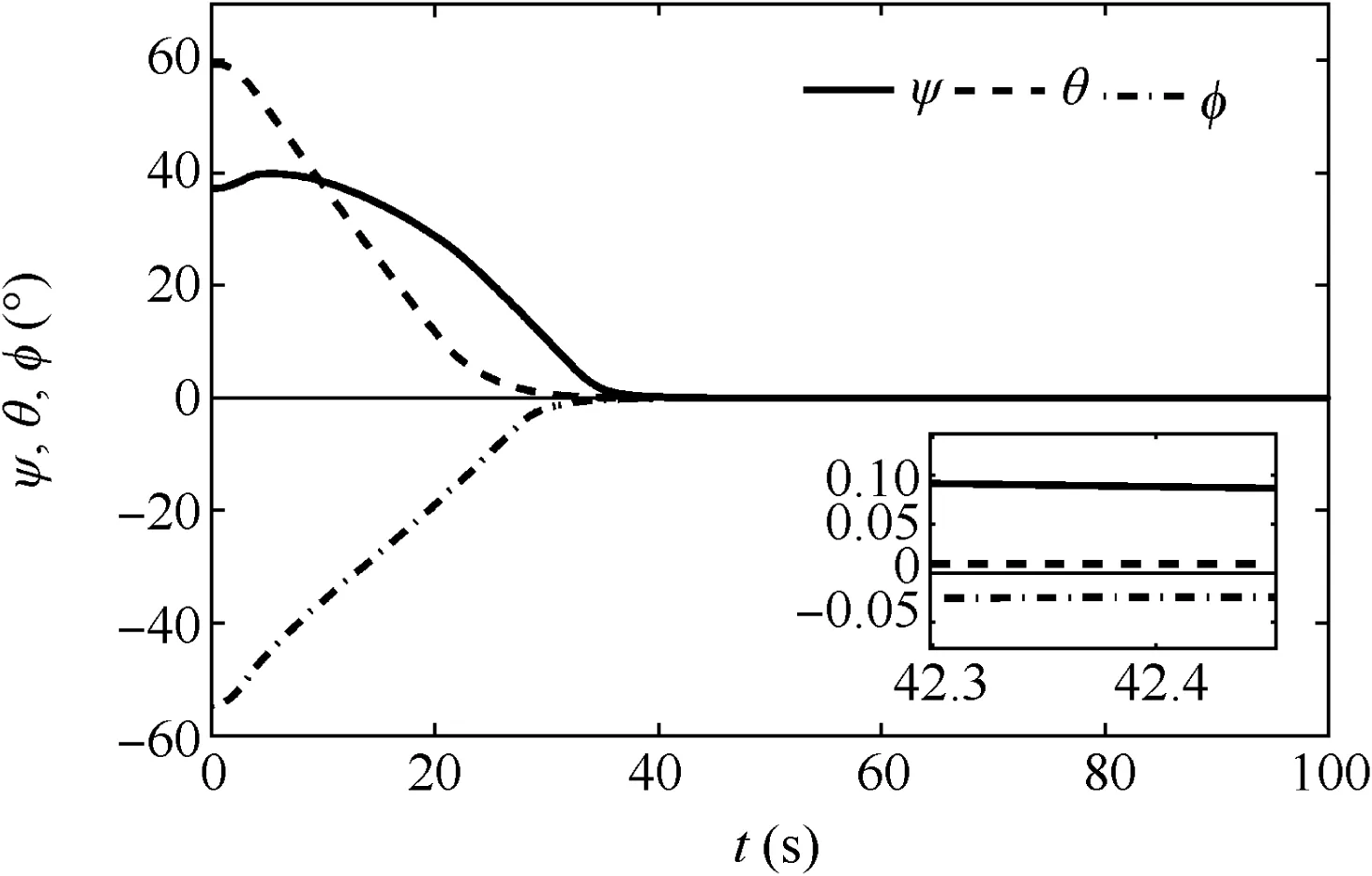
Fig.5 Attitude maneuver errors with planning.
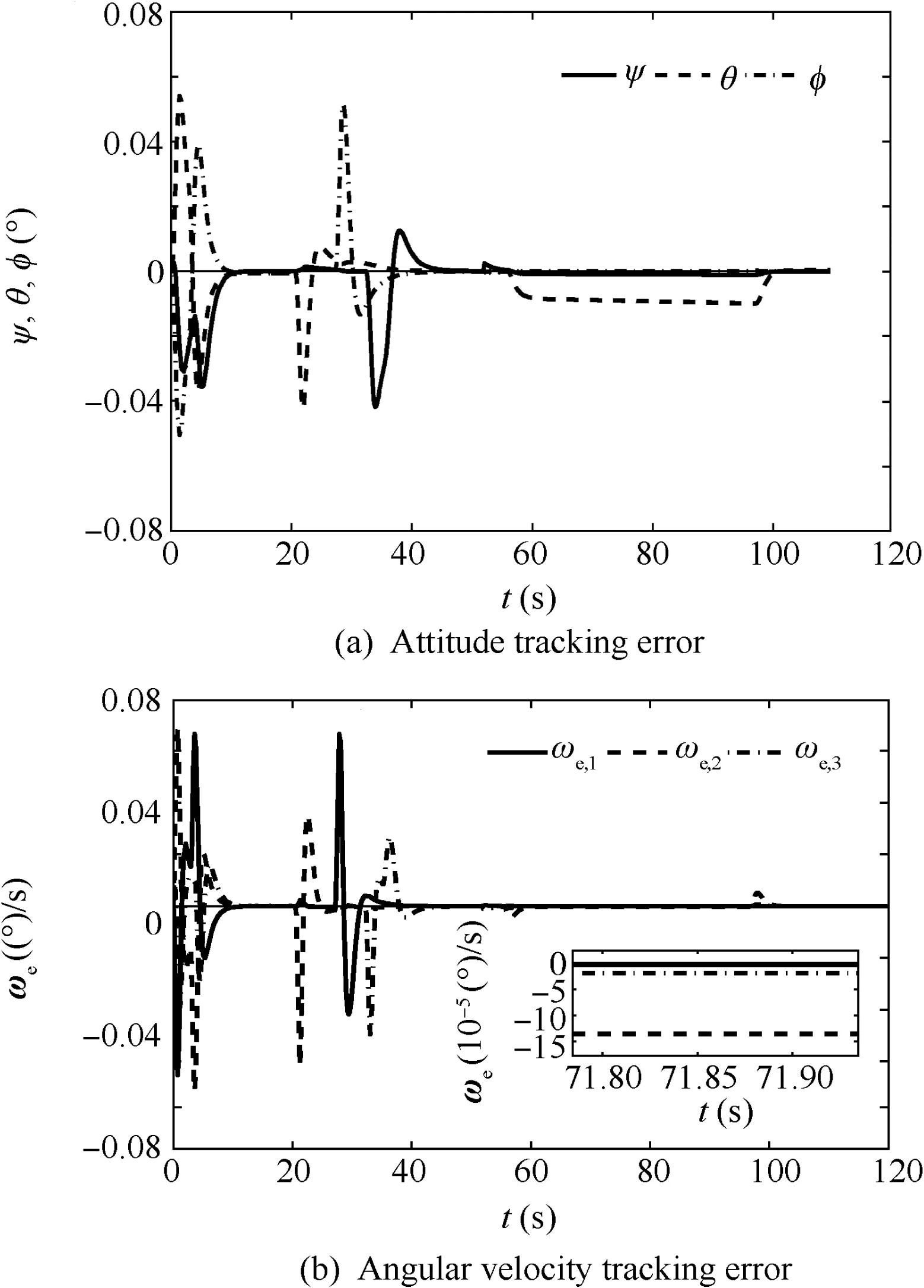
Fig.6 Tracking errors towards programmed attitude.
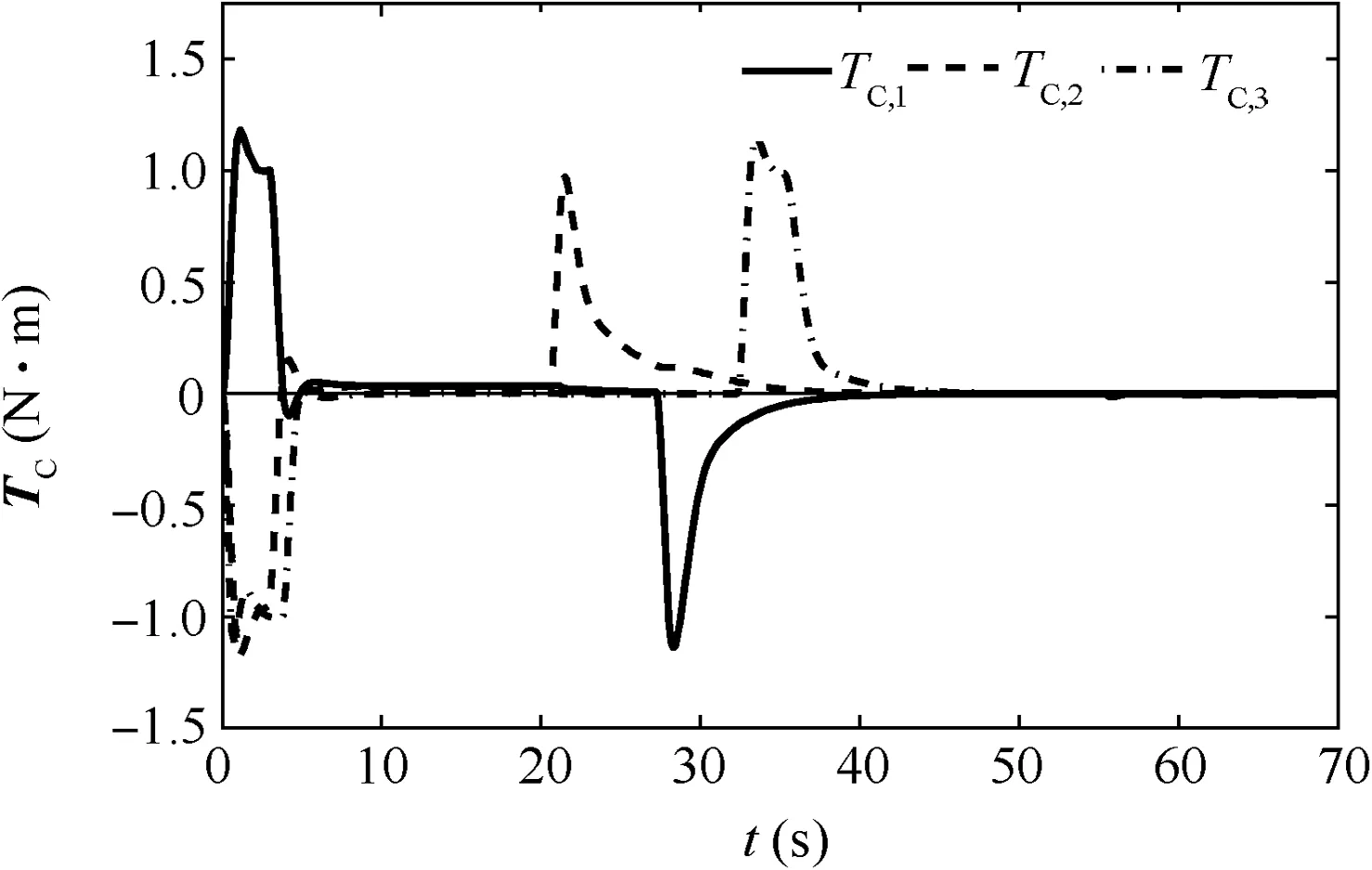
Fig.7 Control torque generated by programmed controller.
Furthermore,since the attitude tracking is carried out towards a small angular error during the whole process,the stability can be improved by choosing a shorter time factor β0in Eq.(66),and the dynamic performance determined by the path planning is not significantly changed.On the other hand,the response time of the feedback control system without the near-optimal planning can be also shortened by choosing a small time factor.However,the volatility of ω,TCand˙TCgenerated by the controller are linearly enlarged accordingly(not shown in the paper).Therefore,since the attitude maneuver performance is mainly determined by the near-optimal programming results,the dependence on the control parameters is thus reduced,and the parametric reliability of the control system is improved indirectly.
5.3.Inertial parameters identification
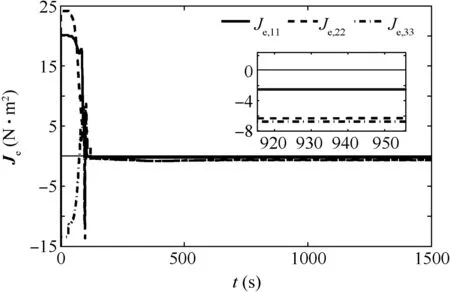
Fig.8 Inertial identification errors.
The attitude maneuver in Section 5.1 is re-performed in this subsection to verify the effectiveness of the on-line identification algorithm.The initial value and the random noise are taken into consideration,and the identification recursion is initiated from an empty data matrix.The curves as shown in Fig.8(marked byreflect the convergence of the diagonal elements of the identification errors,which indicate that the estimation algorithm guarantees the convergence characteristics and the steady accuracy is within±1%.
5.4.Attitude maneuvers with near-optimal property
As indicated by Refs.8,30,the near optimal control can be applied by either on-line methods,or by any combined method which consists of an off-line programmer and a real time open/closed loop tracking controller.Accordingly,a time optimal attitude planning generated by the Radao pseudos pectrum methods41is conducted as a contrast to the cascade saturation method.A multiple constrained R2R maneuver testing,aiming at the zero attitude in the inertial frame,is applied to both methods with the same input limitations.
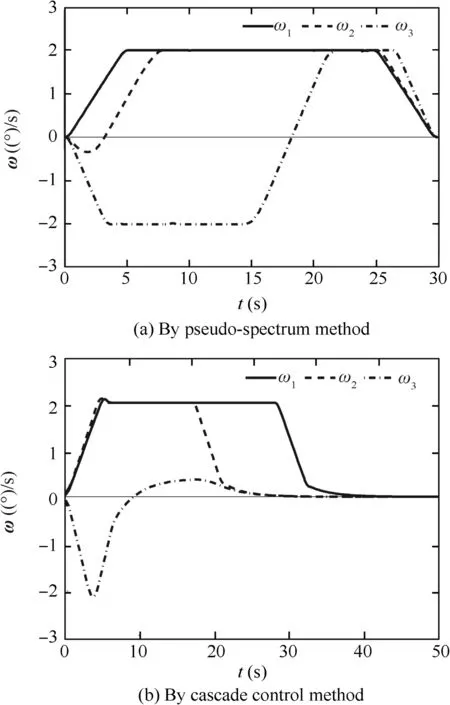
Fig.9 Comparison between the off-line and on-line near optimal attitude maneuver.
As shown in Fig.9,the programmed attitude angular velocities provided for these two methods are similar in their bang of-bang characteristics,and the slew rate is firstly boosted to its limitations in all 3-axis and then decreases to the steady state.The slowing-down process occurs earlier for the cascade control since the linear phase dynamics near the steady state is still more conservative than the optimal convenance.Since the off-line computation of the pseudo-spectrum method may take a certain amount of time(several seconds to tens of seconds according to the CPU performance and the solving accuracy),the process time of the cascade saturation planning is very close to that of the pseudo-spectrum method(i.e.,40 s against 30 s roughly),which indicates that the new cascade saturation proposed in this paper can achieve a near-optimal performance without the off-line programming.
6.Conclusions
The paper proposes a near-optimal cascade control method formulated in a general form,which can be applied to a class of cascade systems with weak nonlinearity such as the ACS.
Targeting at the agile satellite application,in order to provide saturation-free property and guarantee the rapid response of the close-loop dynamic as much as possible,a nonlinear feedback controller is firstly developed to achieve the near minimum-time control based on a multiple-order cascade structure.The asymptotic stability of the corresponding cascade control is then theoretically proven for the ACS case,and the saturation in multiple-order of system states is significantly reduced with the rapid convergence characteristics.Furthermore,for the ACS application,a model reference attitude control logic is applied,where the ideal reference trajectory as a planning is tracked by a nonlinear back-stepping controller with practical adjustment of parameters.Various simulations are further conducted for a rapid large-scale attitude maneuver case including M2M with more complicated saturation properties by considering the practical characteristics of the on-board sensors and actuators.The results show that the proposed near minimum-time feedback control can provide the effectiveness on the anti-saturation while the rapid response is retained at the same time.
Acknowledgements
This study was supported by the National Natural Science Foundation ofChina (Nos.51407011,11372034 and 51207145).
1.Latry C,Delvit JM.Staggered arrays for high resolution earth observing systems.Proceedings of SPIE 2009;7452:74520O-1-12.
2.Thieuw A,Marcille H.Pleiades-HR CMGS-based attitude control system design,development status and performances.Autom Control Aerosp 2007;17(1):834–9.
3.Baillarin S,Gigord P,Hagolle O.Automatic registration of optical images,a stake for future missions:Application to ortho-rectification,time series and mosaic products.Proceedings of the geoscience and remote sensing symposium;2008 Jul 7-11;Boston(MA).Piscataway(NJ):IEEE Press;2008.p.1112–5.
4.Zorn A,West M.Optimal attitude scheduling of an imaging satellite.Proceedings of the AIAA guidance,navigation,and control conference;2013 Aug 19-22;Boston(MA).Reston:AIAA;2013.p.52–4.
5.Anderson NT,Marchisio GB.World View-2 and the evolution of the DigitalGlobe remote sensing satellite constellation:Introductory paper for the special session on WorldView-2.Proceedings of SPIE 2012;8390:83900L-1-15.
6.Longbotham N,Bleiler C,Chaapel C,Padwick C,Emery W,Pacifici F.Spectral classification of WorldView-2 multi-angle sequence.Proceedings of the urban remote sensing event;2011 Apr 11-13;Munich.Piscataway(NJ):IEEE Press;2011.p.109–12.
7.Radhadevi PV,Solanki SS,Nagasubramanian V,Mahapatra A,Reddy DS,Jyothi MV,et al.New era of Cartosat satellites for large scale mapping.Photogramm Eng Remote Sens 2010;76(9):1031–40.
8.Karpenko M,Bhatt S,Bedrossian N,Ross M.Flight implementation of shortest-time maneuvers for imaging satellites.J Guid Control Dyn 2014;37(4):1069–79.
9.Hu QL,Ma GF.Vibration suppression of flexible spacecraft during attitude maneuvers.J Guid ControlDyn 2005;28(2):377–80.
10.Hu Q,Jia YH,Xu SJ.Dynamics and vibration suppression of space structures with control moment gyroscopes.Acta Astronaut 2014;96(4):232–45.
11.Schlanbusch R,Loria A,Kristiansen R,Nicklasson PJ.PD+attitude control of rigid bodies with improved performance.Proceedings of the IEEE conference on decision and control;2010 Dec 15-17;Atlanta(GA).Piscataway(NJ):IEEE Press;2010.p.7069–74.
12.Forbes JR.Attitude control with active actuator saturation prevention.Acta Astronaut 2014;107:187–95.
13.Wu F,Lu B.Anti-windup control design for exponentially unstable LTI systems with actuator saturation.Syst Control Lett 2004;52(s3–4):305–22.
14.Asakawa T,Yamaguchi I,Hamada Y,Kasai T,Nagashio T,Kida T.Anti-windup design for flexible spacecraft attitude control system.Proceedings of the SICE annual conference;2011 Sep 13-18;Tokyo.Tsukuba:SICE;2011.p.1803–6.
15.Lee D.Spacecraft coupled tracking maneuver using sliding mode control with input saturation.J Aerosp Eng 2014;28(5):401–13.
16.Akella MR,Valdivia A,Kotamraju GR.Velocity-free attitude controllers subject to actuator magnitude and rate saturations.J Guid Control Dyn 2005;28(4):659–66.
17.Wallsgrove RJ,Akella MR.Globally stabilizing saturated attitude control in the presence of bounded unknown disturbances.J Guid Control Dyn 2005;28(5):957–63.
18.Bang H,Tahk MJ,Choi HD.Large angle attitude control of spacecraft with actuator saturation.Control Eng Pract 2003;11(9):989–97.
19.Ali I,Radice G,Kim J.Backstepping control design with actuator torque bound for spacecraft attitude maneuver.J Guid Control Dyn 2010;33(1):254–9.
20.Tian L,Xu SJ.Attitude control considering variable input saturation limit for a spacecraft equipped with flywheels.Chin J Aeronaut 2012;25(3):437–45.
21.Lyu JT,Gao D.Attitude synchronization for multiple spacecraft with input constraints.Chin J Aeronaut 2014;27(2):321–7.
22.Hu Q,Jia YH,Xu SJ.Adaptive suppression of linear structural vibration using control moment gyroscopes.J Guid Control Dyn 2014;37(3):990–6.
23.Hu Q,Jiang B,Friswell MI.Robust saturated finite time output feedback attitude stabilization for rigid spacecraft.J Guid Control Dyn 2014;37(6):1914–29.
24.Lu KF,Xia YQ.Adaptive attitude tracking control for rigid spacecraft with finite-time convergence.Automatica 2013;49(12):3591–9.
25.Huo MY,Huo X,Karimi HR,Ni JF.Finite-time control for attitude tracking maneuver of rigid satellite.Abstr Appl Anal 2014;2014(1):247–54.
26.Guo Y,Song SM.Adaptive finite-time backstepping control for attitude tracking of spacecraft based on rotation matrix.Chin J Aeronaut 2014;27(2):375–82.
27.Wie B,Lu JB.Feedback control logic for spacecraft eigenaxis rotations under slew rate and control constraints.J Guid Control Dyn 1995;18(6):1372–9.
28.Wie B,Bailey D,Heiberg C.Rapid multitarget acquisition and pointing control of agile spacecraft.J Guid Control Dyn 2002;25(1):96–104.
29.Teel AR.Global stabilization and restricted tracking for multiple integrators with bounded controls.Syst Control Lett 1992;18(3):165–71.
30.Tekinalp O,Yavuzoglu E.A new steering law for redundant control moment gyroscope clusters.Aerosp Sci Technol 2005;9(7):626–34.
31.Ross IM,Karpenko M.A review of pseudospectral optimal control:From theory to flight.Annu Rev Control 2012;36(2):182–97.
32.Boyarko G,Romano M,Yakimenko O.Time-optimal reorientation of a spacecraft using an inverse dynamics optimization method.J Guid Control Dyn 2011;34(4):1197–208.
33.Gersh J,Peck M.Violet:A high-agility nanosatellite for demonstrating small control-moment gyroscope prototypes and steering laws.Proceedings of the AIAA guidance,navigation and control conference;2009Aug10-13;Chicago.Reston:AIAA;2009.p.3–10.
34.Ma O,Dang H,Pham K.On-orbit identification of inertia properties of spacecraft using a robotic arm.J Guid Control Dyn 2008;31(6):1761–71.
35.Leve FA.Scaled control moment gyroscope dynamics effects on performance.Acta Astronaut 2015;110(3):77–88.
36.Han CY,Guo J,Pechev A.Nonlinear H∞based underactuated attitude control for small satellites with two reaction wheels.Acta Astronaut 2014;104(1):159–72.
37.Lappas VJ,Steyn WH,Underwood CI.Control moment gyro(CMG)gimbal angle compensation using magnetic control during external disturbances.Electron Lett 2001;37(9):603–4.
38.Nguyen-Huynh TC,Sharf I.Adaptive reactionless motion and parameter identification in postcapture of space debris.J Guid Control Dyn 2013;36(2):404–14.
39.Schaub H,Vadali SR,Junkins JL.Feedback control law for variable speed control moment gyroscopes.J Astronaut Sci 1998;46(3):307–28.
40.Garg D,Hager WW,Rao AV.Pseudospectral methods for solving infinite-horizon optimal control problems.Automatica 2011;47(4):829–37.
41.Leeghim H,Lee IH,Lee DH,Bang H,Park JO.Singularity avoidance of control moment gyros by predicted singularity robustness:Ground experiment.IEEE Trans Control Syst Technol 2009;17(4):884–91.
Liu Xiangdongreceived the M.S.and Ph.D.degrees from Harbin Institute of Technology(HIT)in 1992 and 1995,respectively.From 1998 to 2000,he did his post doctor research in mechanical postdoctoral research center in HIT.He is currently a professor with school of automation in BIT.His research interests include high-precision servo control,spacecraft attitude control,Chaos theory.
Li Zhenreceived the B.E.and M.E.degrees in measurement science and control technology with first-class honors from Harbin Institute of Technology,Harbin,China,in 2006 and 2008,respectively.In 2012,he received Ph.D.degree from the Hong Kong Polytechnic University,Hong Kong SAR,China.He is presently the lecturer at School of Automation,Beijing Institute of Technology,Beijing,China.He was a Research Assistant/Associate in Applied Nonlinear Circuits and System Research Group,in the Department of Electronic and Information Engineering at the Hong Kong Polytechnic University,from October 2011 to September 2012 and December 2013 to January 2014.His main research interests include the bifurcation analysis of the complex nonlinear behaviors in renewable energy generation system,and designing power electronic circuits,and the application of largescale integrated measurement technology and control design for the aerospace.
1 June 2015;revised 22 July 2015;accepted 8 January 2016
Available online 11 May 2016
Actuator saturation;
Attitude control;
Identification;
Momentum transfer;
Satellites
?2016 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is an open access article under the CCBY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.Tel.:+86 10 68912460.
E-mail addresses:xdliu@bit.edu.cn(X.Liu),zhenli@bit.edu.cn(Z.Li).
Peer review under responsibility of Editorial Committee of CJA.
 CHINESE JOURNAL OF AERONAUTICS2016年3期
CHINESE JOURNAL OF AERONAUTICS2016年3期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Optimization on cooperative feed strategy for radial–axial ring rolling process of Inco718 alloy by RSM and FEM
- Measuring reliability under epistemic uncertainty:Review on non-probabilistic reliability metrics
- Optimum blade loading for a powered rotor in descent
- Experimental study of ice accretion effects on aerodynamic performance of an NACA 23012 airfoil
- Parachute dynamics and perturbation analysis of precision airdrop system
- Simulative technology for auxiliary fuel tank separation in a wind tunnel