
DYNAMIC RESPONSE ANALYSIS OF DDMS PLATFORM SUBJECTED TO ACTIONS OF WAVE GROUPS AND CURRENT FOURCES*
2011-05-08 05:54SUNZhaochenWANGXinggangLIANGShuxiuLIUShuXueLIUSi
水動力學研究與進展 B輯 2011年6期
SUN Zhao-chen, WANG Xing-gang, LIANG Shu-xiu, LIU Shu-Xue, LIU Si
State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116024, China, E-mail: sunzc@dlut.edu.cn
DYNAMIC RESPONSE ANALYSIS OF DDMS PLATFORM SUBJECTED TO ACTIONS OF WAVE GROUPS AND CURRENT FOURCES*
SUN Zhao-chen, WANG Xing-gang, LIANG Shu-xiu, LIU Shu-Xue, LIU Si
State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116024, China, E-mail: sunzc@dlut.edu.cn
(Received April 19, 2011, Revised May 15, 2011)
Coupled dynamic analysis of the Deep Draft Multi-Spar (DDMS) platform and the mooring system under the action of waves and current is carried out in the time domain. Using a geometrically nonlinear finite element method, the mooring-line dynamics is simulated based on the total Lagrangian formulation. Wave groups are obtained by the JONSWAP spectrum and an empirical wave envelope spectrum involving two envelope-based factors Group Height Factor (GFH) and Group Length Factor (GLF). The results show that the wave groups have a significant effect on the motion responses of the platform and the mooring line tensions.
Deep Draft Multi Spar (DDMS) platform, dynamic response, wave groups, current fources
Introduction
In deep or ultra-deep water, the mass and the damping of the mooring lines would become important and have appreciable effects on the surface platform motions, to make a coupled dynamic analysis of floating platforms with the mooring lines critical in their designs. Kim et al.[1]showed that an uncoupled analysis of Spars may give inaccurate results for cases in deepwater. Chen et al.[2]compared the computed and measured results, and showed that the numerical model can effectively simulate the motion responses of the tunnel element and the cable tensions when the motions of the tunnel element are within some limit. Yang and Kim[3]performed a numerical study of the transient effect of the tendon disconnection on the global performance of an Extended Tension Leg Platform (ETLP) under harsh environmental conditions of Gulf Of Mexico (GOM). Liapis et al.[4]made some global motion predictions of the Perdido Spar using Shell’s in-house COSMOS/WAMIT suite of programs, with extensive comparisons between the numerical predictions and the experimental results. In all cases, the comparisons saw very good agreements. Liu et al.[5]developed a Time-domain Higher-Order Boundary Element Method (THOBEM) for simulating wave-current interactions with 3-D floating bodies. Shi et al.[6]employed the method of bimodal spectrum to simulate the mixed waves that swell and wind wave appearing at the same time, performed the experiments for a LNG ship moored to an island berth. Low and Grime[7]analyzed the extreme response of floating structures using the coupled frequency domain method. Wang et al.[8]analysised a moored Spar platform in irregular waves in deepwater.
Ocean waves often appear in sequences of high wave elevations, known as wave groups. They occur in both deep and shallow water, and meanwhile, can cause severe loading on floating structures, especially at or near the natural motion frequencies. Hence, their influence is an important issue in the design of the ocean structures. Johnson et al.[9]studied the effects of wave grouping on breakwater stability and the two wave trains of a wave spectrum. It was shown that the one with higher extent of grouping was more dangerous. Lin and Huang[10]used the linear wave theoryand the Longuet-Higgins and Steward’s Group-induced Second-order Long Wave (GSLW) theory to study the grouping effect on wave forces acting on a vertical breakwater. With the wave grouping effect being considered, the calculated total wave pressure on the vertical breakwater was found agreeing well with the measured value. Buldakov et al.[11]studied the diffraction of a directionally wave group by a bottom-seated circular cylinder. Balaji et al.[12]theoretically simulated the wave groups and tested a scale modeled discus buoy for its motion characteristics under the impact of wave groups of different frequencies in a wave tank. The effect of grouping parameters on the surge, heave and pitch motions of the buoy was discussed.
Liu et al.[13]made a further investigation of the form of the practical wave envelope spectrum based on the field measured sea waves and developed an effective numerical method to simulate wave groups using the wave envelope spectrum. Furthermore, the desirable simulated waves were reproduced satisfactorily in a wave tank. In this article, the wave elevations with wave grouping are simulated by this method.
A six degree of freedom numerical code is developed for the coupled dynamic analysis of the floating structure and the mooring system. Wave exciting forces, added mass and radiation damping, viscous damping and wave drift damping are calculated using the boundary element method[14]and the Morison formulation. Based on the total Lagrangian formulation, a geometrically nonlinear finite element method using isoparametric cable elements is developed to solve the mooring line dynamics. The Newmark method is used for the dynamic nonlinear analysis of mooring lines. Wave groups are obtained by the JONSWAP spectrum and an empirical wave envelope spectrum involving two envelope-based factors Group Height Factor (GFH) and Group Length Factor (GLF). The coupled motion equations are solved numerically by the fourth-order Runge-Kutta algorithm. Coupled dynamic analysis of the Deep Draft Multi-Spar (DDMS) platform and the attached mooring lines under the action of random waves with or without grouping and current in deep water is carried out in the time domain.
1. Coupled dynamic equation
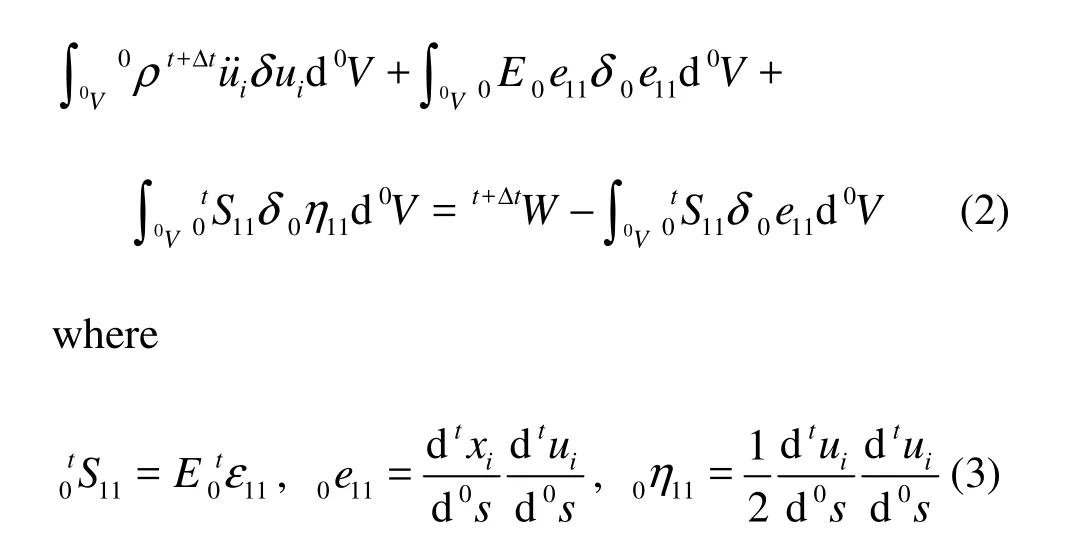
The time domain analysis is carried out by using the direct numerical integration of equations of motions. The equation of motion for the coupled nonlinear model of the DDMS platform is


where x(t) is the structural displacement vector, that with an upper dot is the velocity vector and that with double upper dots the acceleration vector, [M] is the system mass matrix, [m(∞)] is the equivalent added mass of the structure with an infinite frequency, [K (t?τ)] is the retardation function (the inverse cosine Fourier transform of the radiation damping) matrix, bWD(t) is the wave drift damping coefficient, ξ˙ is the slow-drift velocity, [C] is the hydrostatic restoring coefficient, FI(t) is the wave exciting force, FD(t) is the damping force induced by the hull and the heave plates, FM(t) is the transmitted force matrix from the interface (the mooring line).
2. Mooring line dynamics
2.1 Formulation of cable structure
For describing the mooring-line dynamics, a geometrically nonlinear finite element method based on the total Lagrangian formulation is developed. Figure 1 shows the initial and the deformed states of the cable elements.
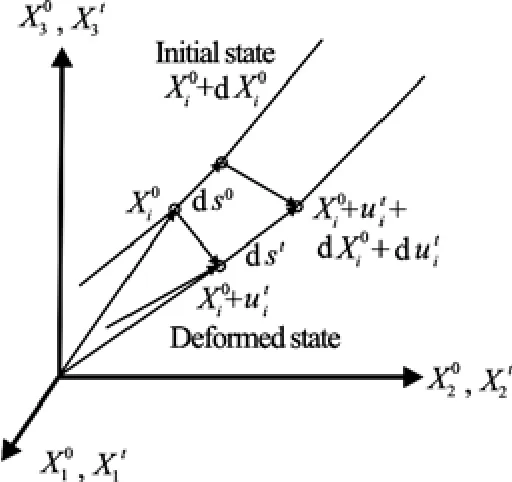
Fig.1 The initial and deformed states of a cable element

The isoparametric cable element with an arbitrary orientation in space is described by two nodes in the present study. With interpolation shape functions, the coordinates and displacement components at any point of the element can be interpolated by use of nodal coordinates and nodal displacements:
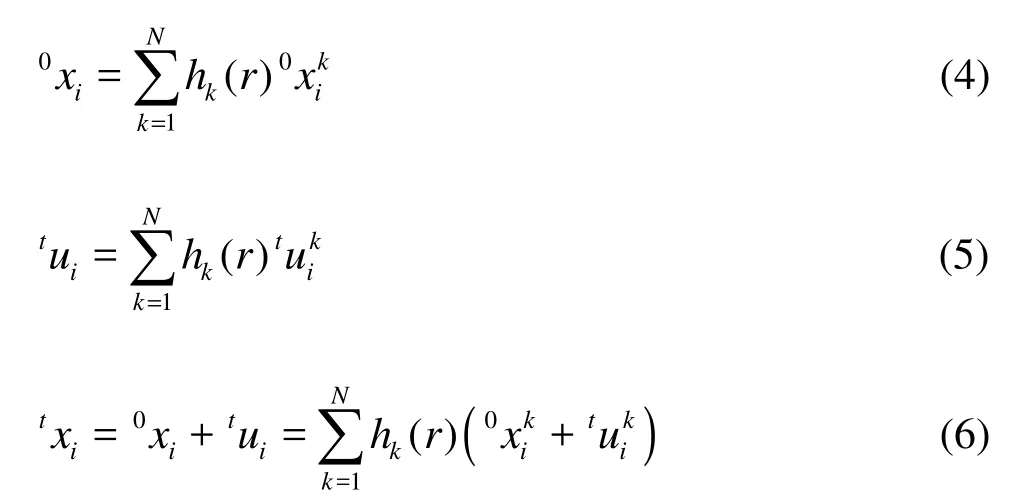
where N is the total number of element nodes (N=2), r is the natural coordinate, hk( r) is the interpolation shape function.
Accordingly, the finite element equations of motion for the cable element can be represented by the following matrix equation
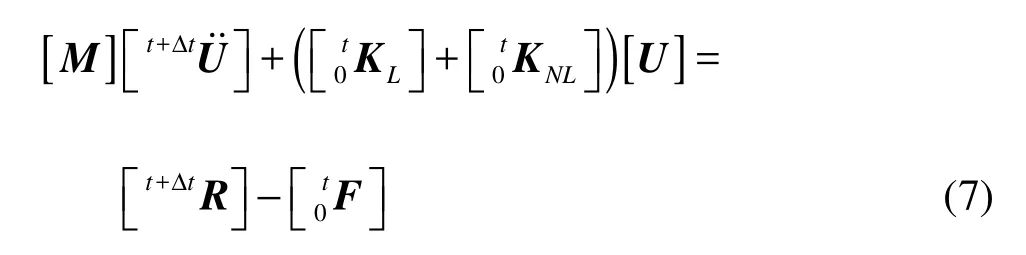
where [M] is the mass matrix of the cable element, [0tKL]and [0tKNL] are the linear and nonlinear strain incremental stiffness matrices, respectively, [t+ΔtR] is the vector of the externally applied nodal point load at time t+Δt, [0tF] is the vector of the nodal point force equivalent to the element stress at time t. The following Gauss integration formulas are used to calculate the terms described above:

Newmark method and Newton-Raphson iteration method are combined to solve the dynamic equilibrium equation of the mooring lines.

Table 1 Physical and geometrical properties of synthetic cable
2.2 Numerical examples
The cable properties are given in Table 1. The nonlinear stress-strain relation[15]of the investigated mooring line is expressed asto the effect of the strongly geometric nonlinearity, there is a slight difference between the results, especially, for the minimum values.

Fig.2 Comparison of dynamic tension (T)
3. Wave groups and wave exciting forces
Wave exciting forces can be computed using the following relationship
where h(1)(t? τ) and h(2)(t?τ1,t ?τ2)are, respectively, the linear and quadratic impulse response functions, which are related to the linear transfer functions H(1)(ω) and the quadratic transfer functions H(2)(ω1, ω2)as
As is well known, the sum-frequency wave force has little effect on the slowly drifting motion of a floater, so it could be neglected. Newman’s approximation assumes that the difference-frequency force QTFs can be approximated by the mean-drift forces and the moments (diagonal values), as is done here. η( t) are the time series of the wave elevation. A random wave can be simulated by the superposition of linear component waves


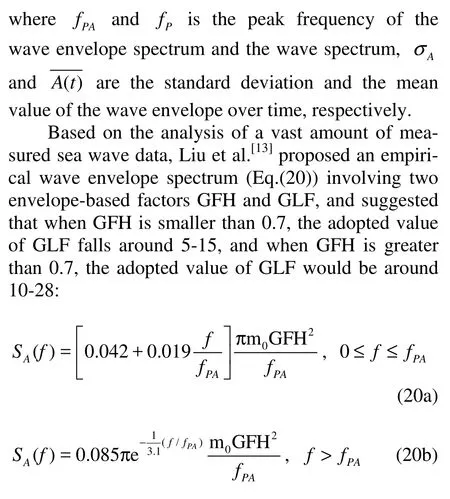
where fPand fPAare the peak frequencies of the wave envelope spectrum and the wave spectrum.
The expected random wave history η1(t) is constructed by two random wave signals η′(t) and ηA(t) in the calculation, which can be calculated with the expected wave spectrum S( f) and the wave envelope spectrum SA(f) as the targets, respectively. Then the energy distribution of its wave envelope serves as the expected envelope spectrum, meanwhile, its mean period and energy are equivalent to those of the wave generated by the expected wave spectrum:
4. Damping forces
4.1 Viscous damping
Viscous damping induced by the hull is calculated by using a Morison’s drag item

where CDHis the Morison drag coefficient, uwis the water particle velocity from waves, ucis the water particle velocity in the current, x˙ is the structure velocity, D and H are the diameter and the length of the cylinder, respectively.
Prislin et al. (1998) tested single and multiple square plates in water and proposed to calculate the hydrodynamic forces on a heave plate using the Morison formulation

where ρ is the fluid density, L is the plate width, U and ?U/?t represent, respectively, the relative velocity and acceleration of the plate in the direction perpendicular to its plane, CDand CAare the drag and the added mass coefficients, respectively.
4.2 Wave drift damping
The wave drift damping forces[18]on a six degree of freedom body in the time domain can be represented as
The wave drift damping due to the yaw motion is neglected in this study.
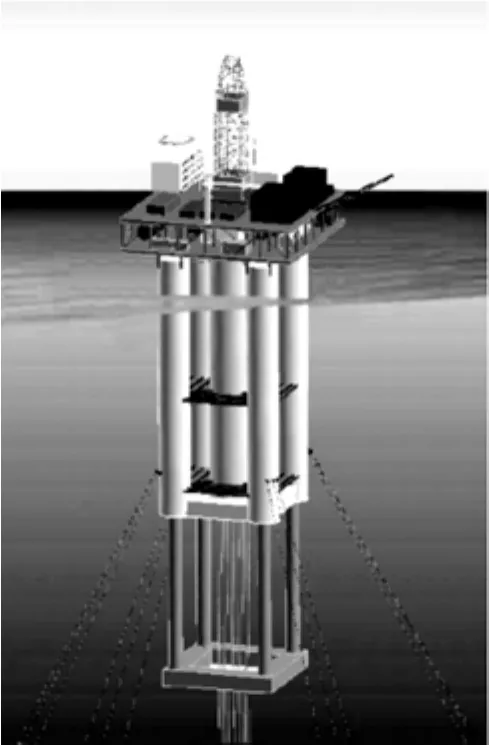
Fig.3 DDMS platform
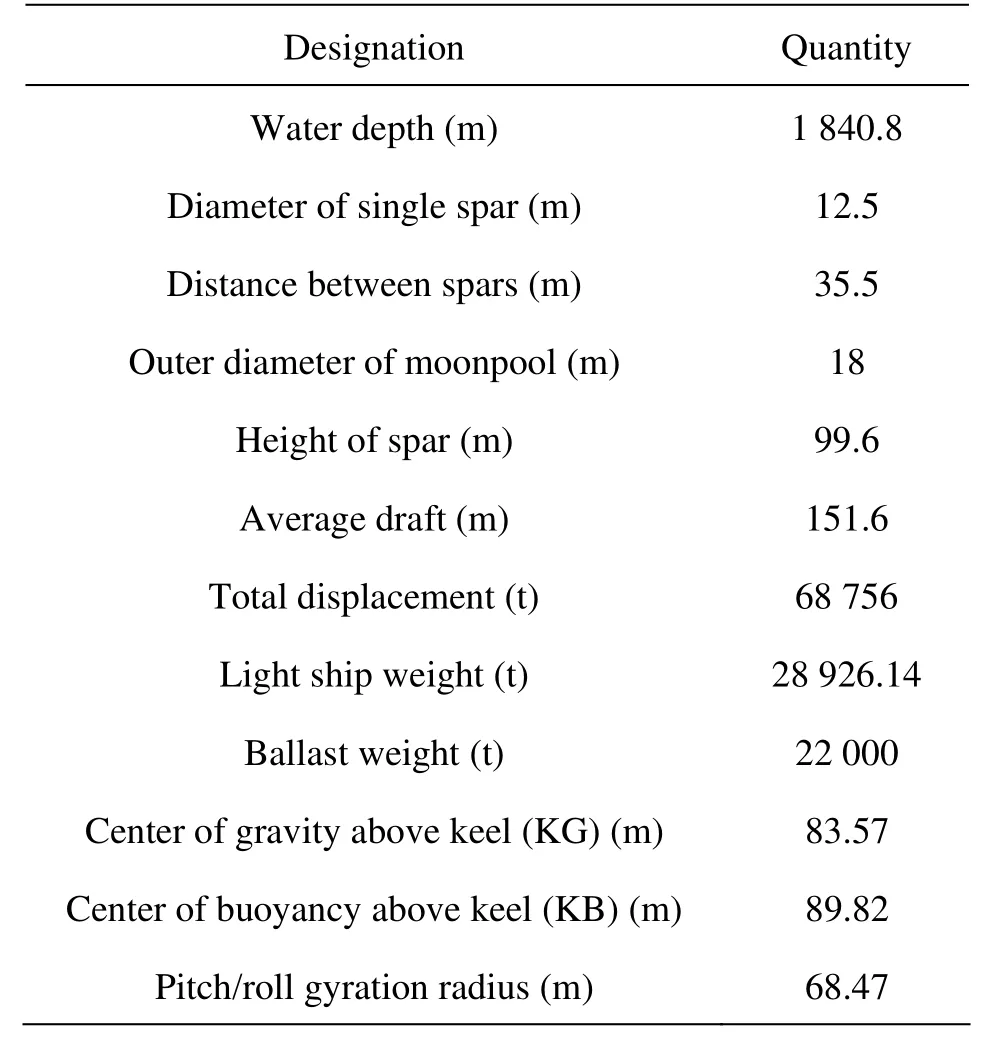
Table 2 Main characteristics of DDMS
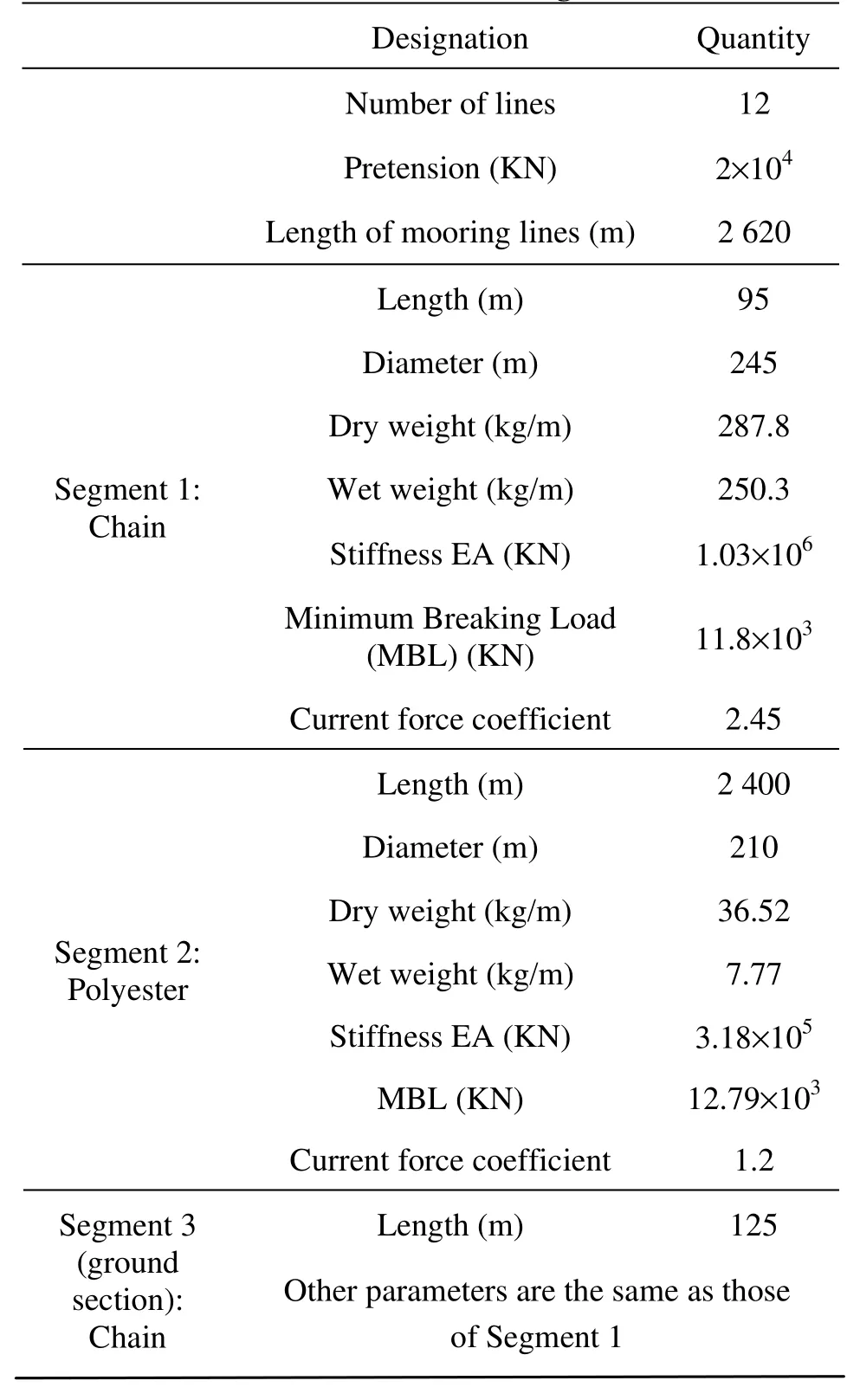
Table 3 Main characteristics of mooring lines for DDMS
5. Description of DDMS platform and mooring system
On the basis of analyzing the respective characteristics of the existing types of deepwater platforms, Li et al.[19,20]proposed a new DDMS platform concept for deepwater drilling and production. The DDMS platform combines the design features and merits of the Truss Spar and SEMI platforms as shown in Fig.3. The main characteristics of the DDMS platform are tabulated in Table 2.
The mooring system of the DDMS platform consists of twelve hybrid mooring lines which are separated into four groups and symmetrically arranged on the four columns, and each group contains three mooring lines being arranged symmetrically at an interval of five degrees as is shown in Fig.4. The main characteristics of the mooring lines are tabulated in Table 3.

Table 4 Environmental conditions
6. Numerical results and discussions: Case studies
The motion equations of the hull and the dynamic equations of its mooring system are integrated with appropriate boundary conditions at their connec-tion points (fairleads or porches). In this study, the hinged boundary conditions are assumed for the floater and the mooring lines, that means no relative movements and no bending moments are applied on the connection points. With the fourth-order Runge-Kutta algorithm, the dynamic equations for the floater and the mooring system can be solved simultaneously in the time domain.
The operation conditions in GOM (Case 1) and Swell extremes in West Africa (Case 2) are selected in the simulation. Details of the waves and the current profile are listed in Table 4, and the same current profile is adopted for the two kinds of environmental conditions. The wave and current directions are collinear as shown in Fig.4. Using the JONSWAP spectrum, the random waves without grouping can be simulated, meanwhile the typical wave elevation histories with grouping parameters GFH=0.7 and GLH=17.5 could be simulated by the method mentioned above.
In the present study, the water depth is 1 840.8 m, the average draft of the DDMS platform is 151.60 m, the submersible hull is discretized by 1 492 panels per quadrant and each mooring line is modeled with 82 cable elements. The time interval used is 0.2 s and the simulation takes 3.0 h.

Fig.5 Added mass of DDMS platform in surge (a11), heave (a33) and pitch (a55) direction
The added mass and the radiation damping of the DDMS platform in surge, heave and pitch directions are displayed in Fig.5 and Fig.6, respectively. Surge, heave and pitch Response Amplitude Operators (RAOs) of the hull are depicted in Fig.7. As can be seen, the added mass of the platform in heave direction varies only little when the frequency increases.
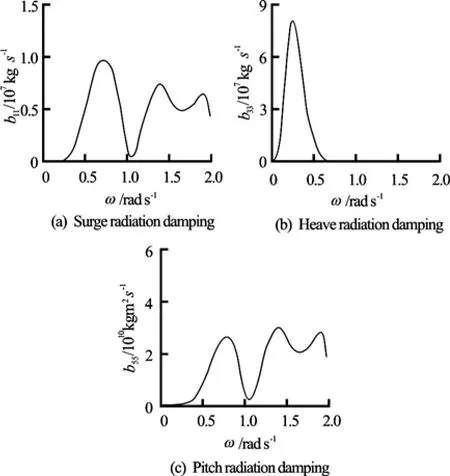
Fig.6 Radiation damping of DDMS platform in surge (b11), heave (b33) and pitch (b55) direction
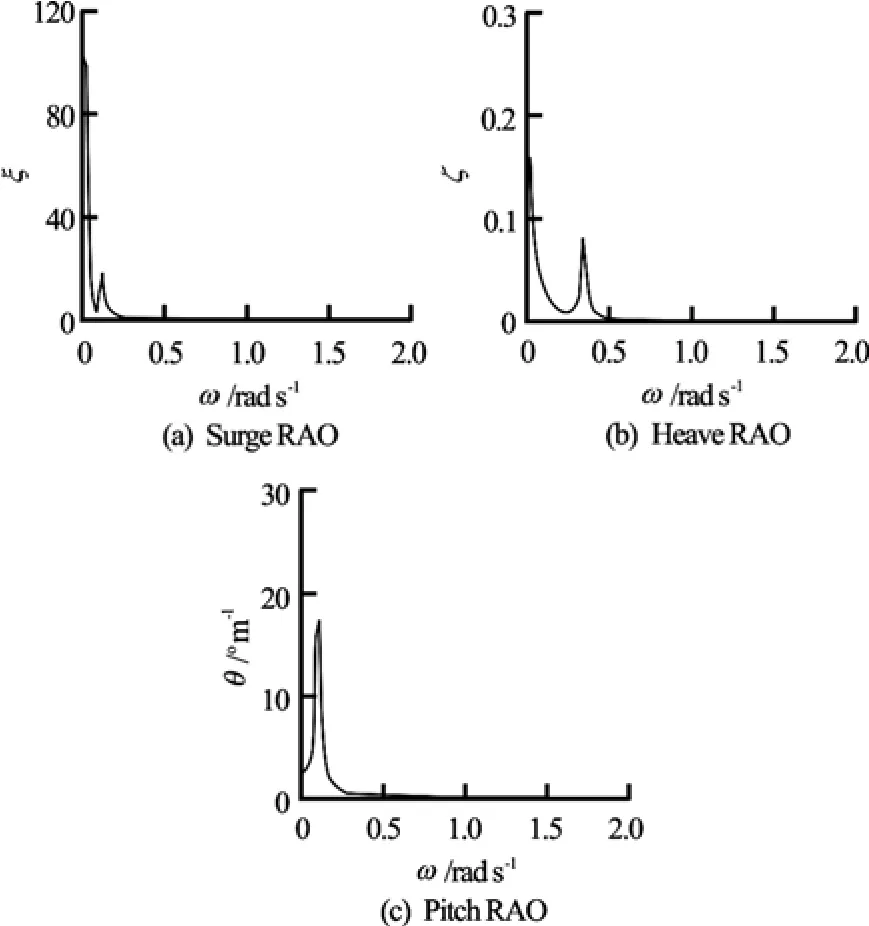
Fig.7 Surge ()ξ , heave (ζ) and pitch ()θ RAOs of DDMS platform
6.1 Case 1: Operation condition in GOM
The random wave elevation and the wave grouping elevation (with GFH=0.7, GLH=17.5) of Case 1 are depicted in Figs.8(a) and 8(b), respectively. The corresponding target and acquired wave spectrums are shown in Fig.8(c). The corresponding target as well as acquired wave envelope spectrums are shown in Fig.8(d). The target spectrum sees a good agreement with the acquired spectrum both for the wave and the wave envelope.
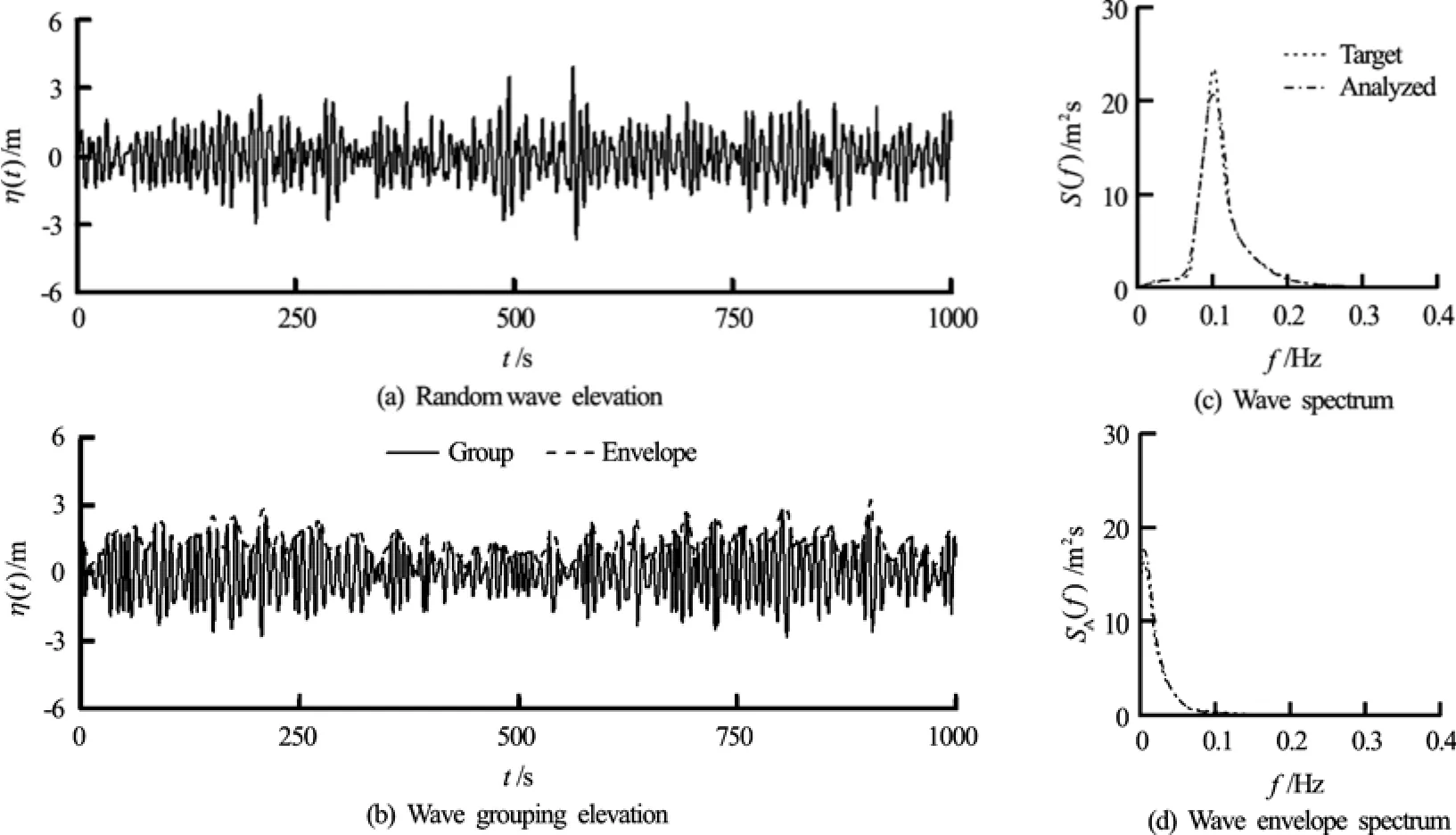
Fig.8 Wave elevations and spectrums
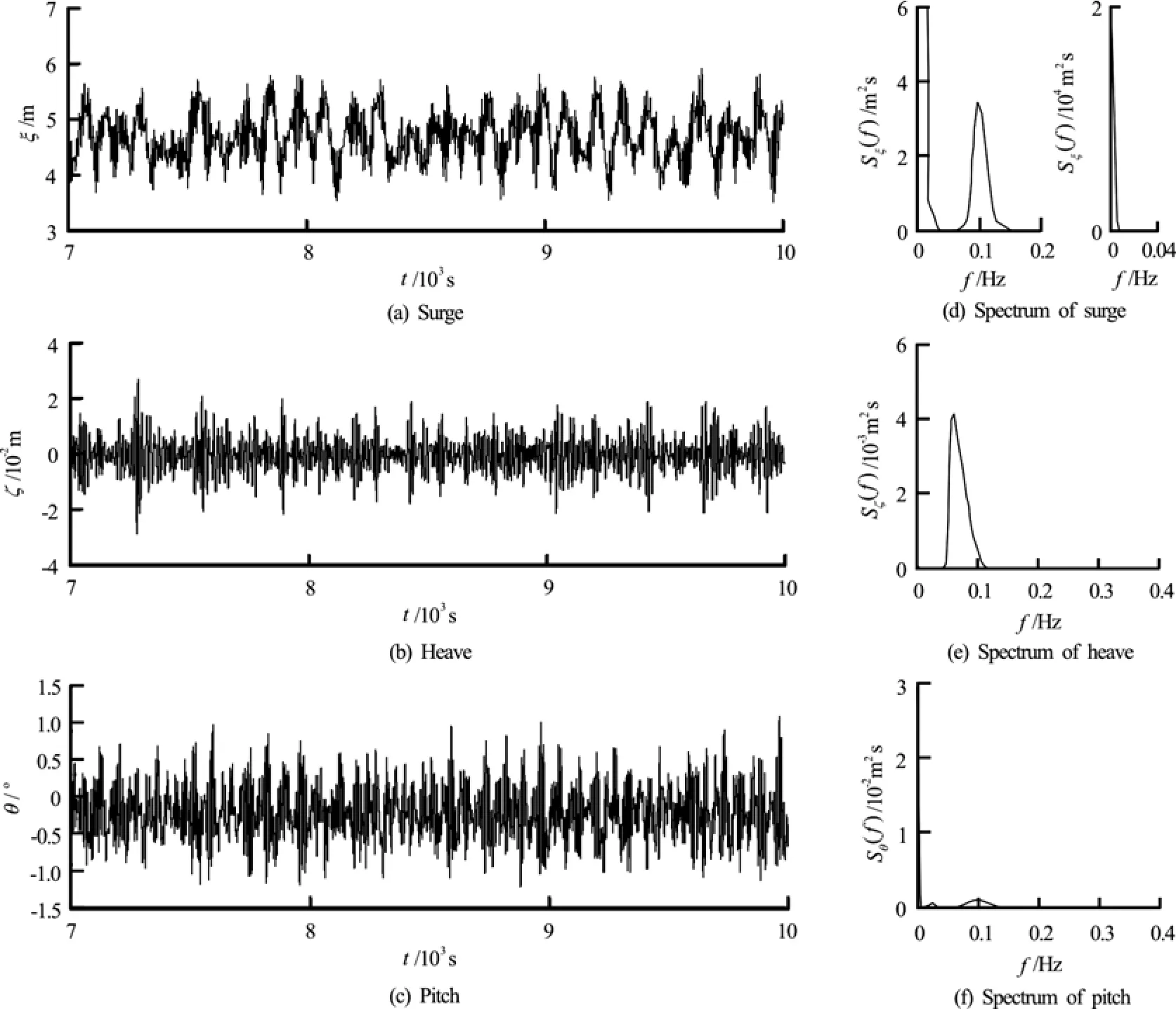
Fig.9 Surge, heave and pitch of DDMS platform and corresponding spectrums in random wave and current
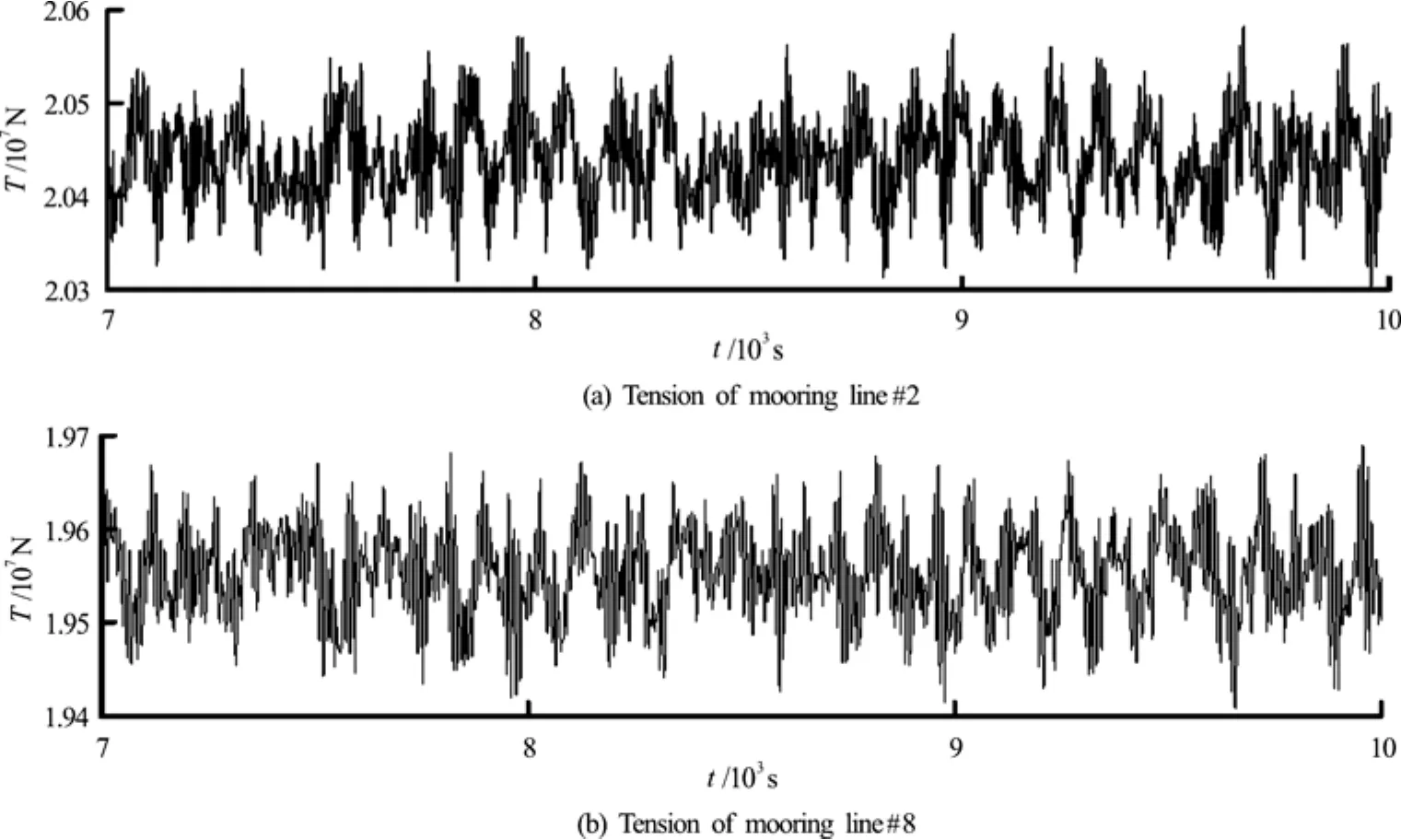
Fig.10 Tensions of mooring lines in random wave and current
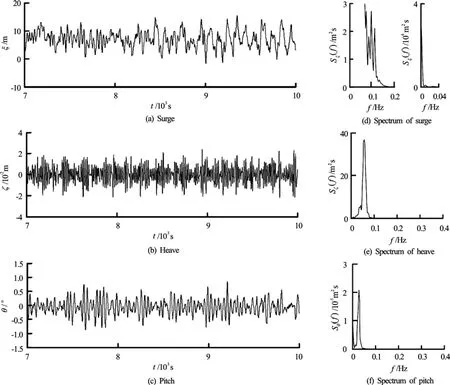
Fig.11 Surge, heave and pitch of DDMS platform and corresponding spectrums in wave groups and current
Figure 9 demonstrates the surge heave and pitch of the DDMS platform and the corresponding spectrums in the random wave and current. As can be seen in Fig.9(a), the DDMS platform moves far away from the original equilibrium position under the action of the current force and the slowly drifting force in the surge direction, and the surge spectrum sees much more energy concentration in the low frequency range than in the wave frequency range as shown in Fig.9(d). However, the hull makes a little heave motion as shown in Fig.9(b). The tensions of the mooring lines #2 and #8 are depicted in Figs.10(a) and 10(b), respectively. Apparently, the influence of the slowly drifting motion in the surge direction on the tensions of the mooring lines is significant.
Figure 11 demonstrates the surge, heave and pitch of the DDMS platform and corresponding spectrums in wave groups (with GFH=0.7, GLH= 17.5) and current, and the corresponding tensions of mooring line #2 and #8 are depicted in Figs.12(a) and 12(b), respectively. By comparing Fig.11 to Fig.9, and Fig.12 to Fig.10, it can be concluded that the effects of wave grouping both on the motion response of the platform and the tensions of the mooring lines aresignificant.
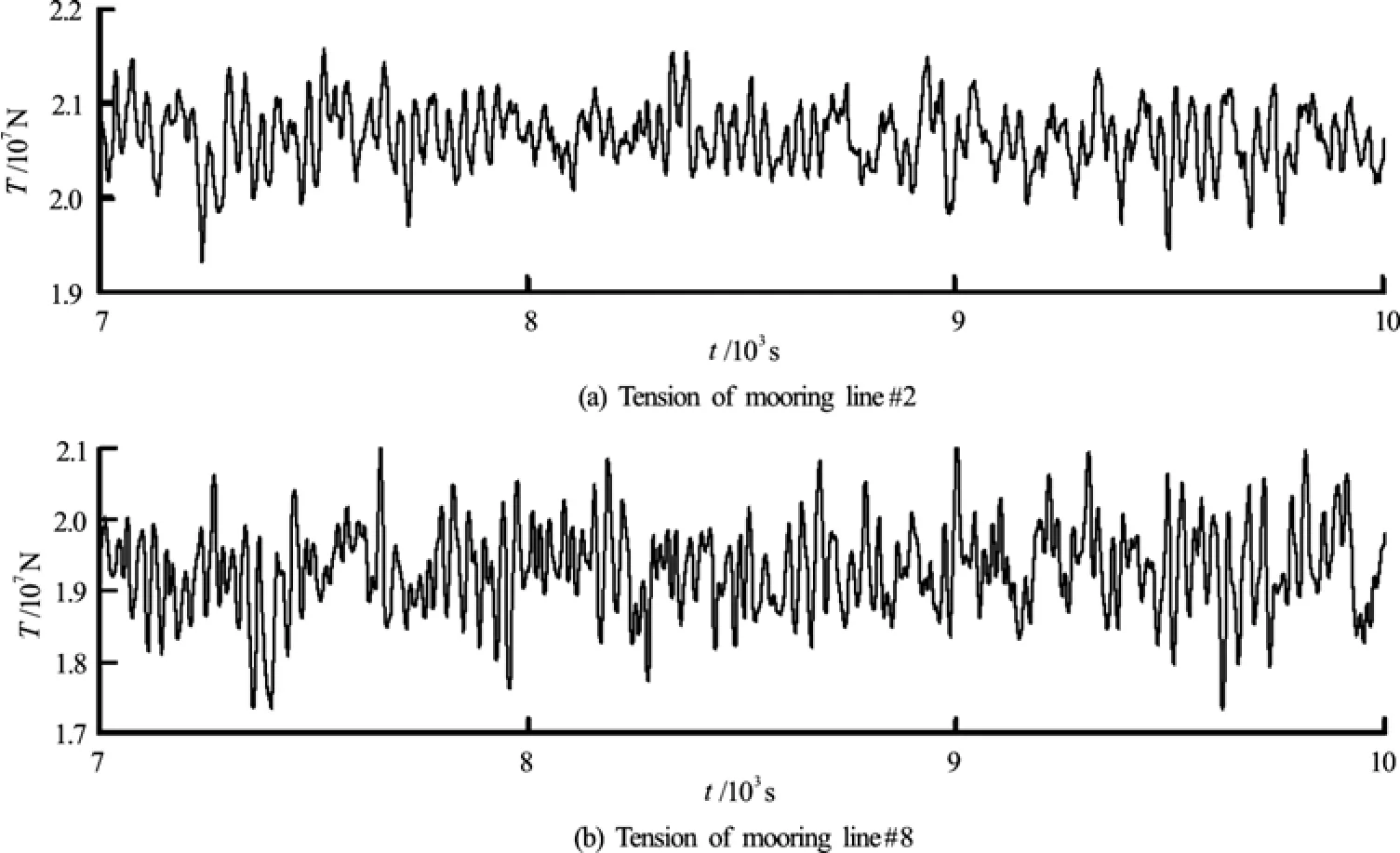
Fig.12 Tensions of mooring lines in wave groups and current
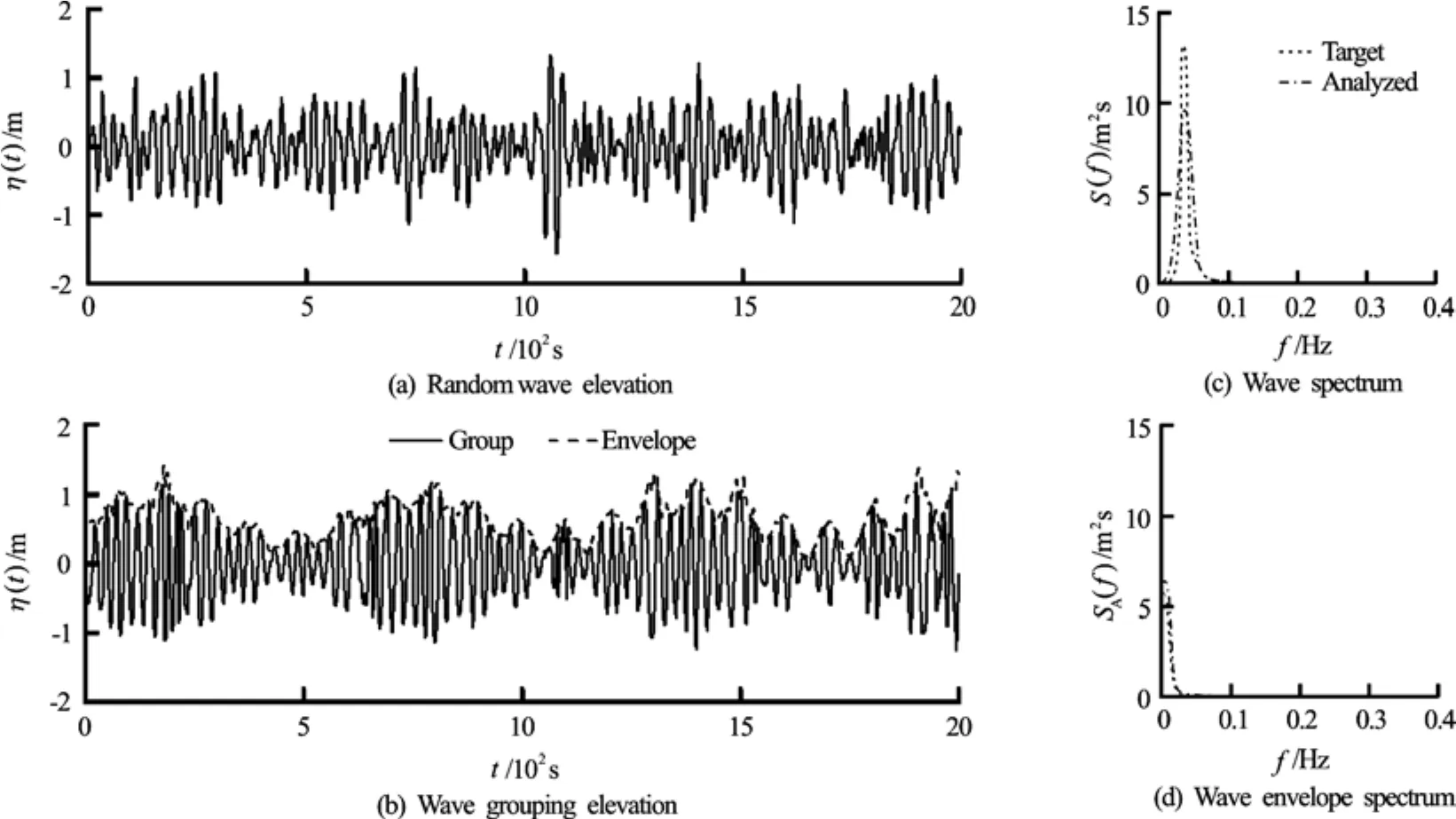
Fig.13 Wave elevations and spectrums
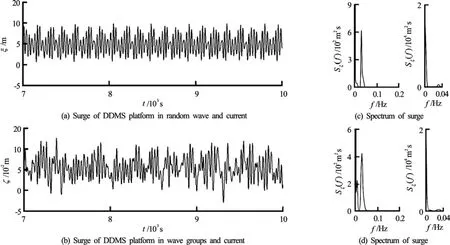
Fig.14 Surge of DDMS platform and corresponding spectrums in random wave /wave groups and current
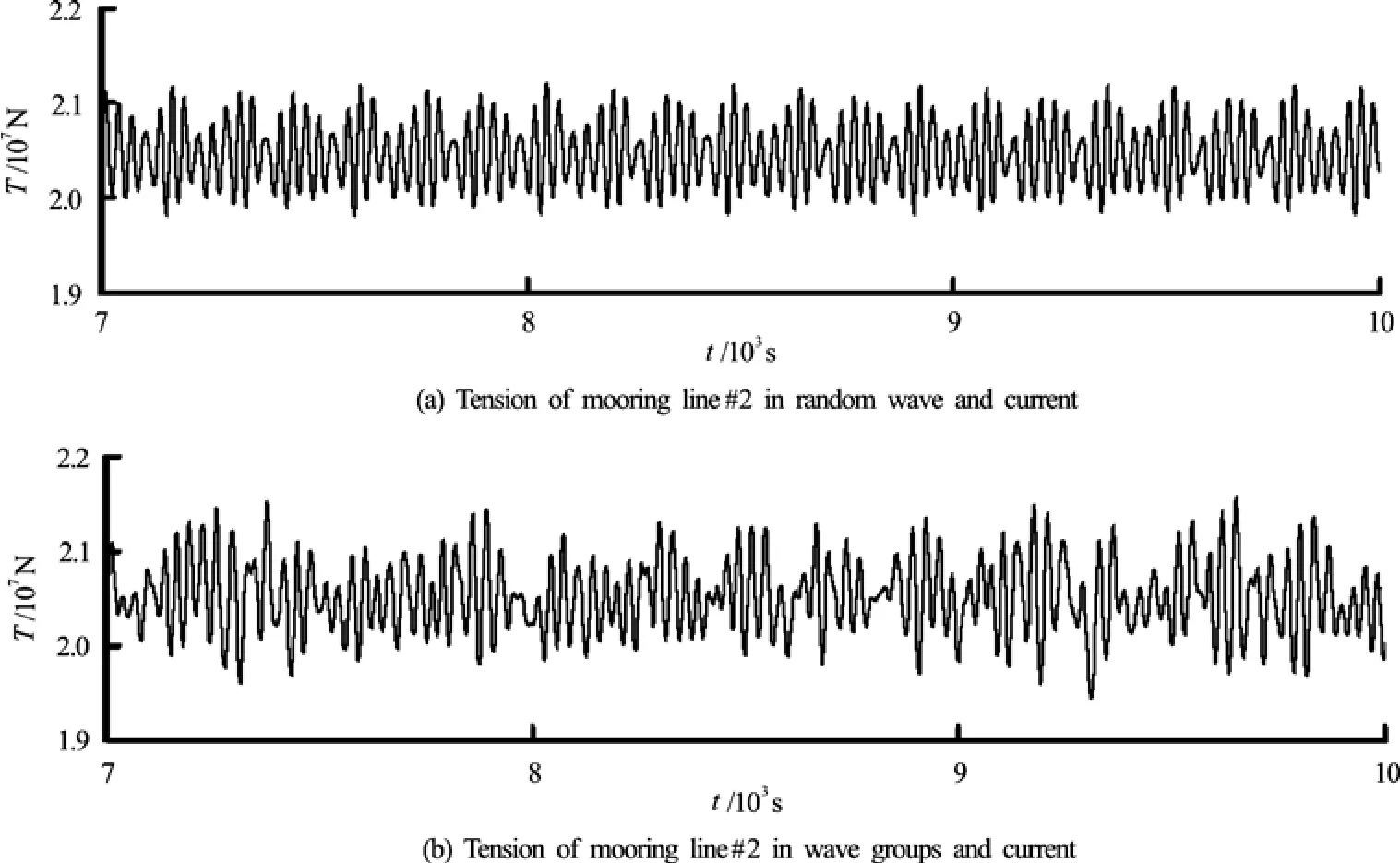
Fig.15 Tensions of mooring lines #2 in random wave/ wave groups and current
6.2 Case 2: Swell extremes in West Africa
The random wave elevation and wave grouping elevation (with GFH=0.7, GLH=17.5) of Case 2 are depicted in Figs.13(a) and 13(b), respectively. The corresponding target and acquired wave spectrums are shown in Fig.13(c). The corresponding target as well as acquired wave envelope spectrums are shown in Fig.13(d). The target spectrum sees a good agreement with the acquired spectrum both for wave and wave envelope.
Figures 14(a) and 14(c) show the surge of the DDMS platform and the corresponding spectrums in the random wave and current, and the corresponding tensions of the mooring line #2 are shown in Fig.15(a). Figures 14(b) and 14(d) show the surge of the DDMS platform and the corresponding spectrums in wave groups (with GFH=0.7, GLH=17.5) and current, and the corresponding tensions of the mooring line #2 are shown in Fig.15(b).
By comparing the surge responses and the mooring line tensions of Case 1 with those of Case 2, it can be concluded that the wave grouping has significant effects on both the motion responses of the plat-form and the mooring line tensions, however, the effects of the wave grouping of Case 1 are not as great as that of Case 2 owing to the different wave condition.
7. Conclusion
The coupled dynamic analysis of a DDMS platform moored in deep water is performed in two kinds of environmental conditions. Both the random waves without grouping and the wave groups (with GFH= 0.7, GLH=17.5) are simulated. The results show that the wave groups have significant effects on the motion behavior of the moored DDMS platform and the tensions of the mooring lines. However, the mechanism of how the two envelope-based factors GFH and GLF affect the results is not discussed here, which would be investigated in a future study.
[1] KIM M. H., ARCANDRA T. and KIM Y. B. Validability of spar motion analysis against various design methodologies/parameters[C]. 20th International Conference on Offshore Mechanics and Arctic Engineering. Los Angeles, Califonia, USA, 2001.
[2] CHEN Zhi-jie, WANG Yong-xue and WANG Guo-yu et al. Time-domain responses of immersing tunnel element under wave actions[J]. Journal of Hydrodynamics, 2009, 21(6): 739-749.
[3] YANG C. K., KIM M. H. Transient effects of tendon disconnection of a TLP by hull-tendon-riser coupled dynamic analysis[J]. Ocean Engineering, 2010, 37(8-9): 667-677.
[4] LIAPIS S., BHAT S. and CARACOSTIS C. et al. Global performance of the perdido spar in waves, wind and current: Numerical predictions and comparison with experiments[C]. ASME 2010 29th International Conference on Ocean, Offshore Arctic Engineering. Shanghai, 2010, 863-873.
[5] LIU Zhen, TENG Bin and NING De-zhi et al. Wavecurrent interactions with three-dimensional floating bodies[J]. Journal of Hydrodynamics, 2010, 22(2): 229-240.
[6] SHI Xian-ying, ZHANG Ning-chuan. Experimental study of a mooring ship’s motion responses in mixed waves[J]. Chinese Journal of Hydrodynamics, 2011(5): 574-580(in Chinese).
[7] LOW Y. M., GRIME A. J. Extreme response analysis of floating structures using coupled frequency domain analysis[J]. Journal of Offshore Mechanics and Arctic Engineering, 2011, 133(3): 31601-31608.
[8] WANG Xing-gang, SUN Zhao-chen and LIANG Shuxiu. Motion responses analysis of moored spar platform in irregular waves in deepwater[J]. Shipbuilding of China, 2011, 52(2): 16-24(in Chinese).
[9] JOHNSON R. R., MANSARD E. P. D. and PLOEG J. Effects of wave grouping on breakwater stability[C]. Proceedings of Sixteenth Coastal Engineering Conference. Hamburg, Germany, 1978, 2228-2243.
[10] LIN Wei-qi, HUANG Pei-ji. The wave grouping effect on wave forces on a vertical breakwater[J]. Chinese Journal of Oceanology and Limnology, 1996, 14(1): 91-95.
[11] BULDAKOV E. V., TAYLOR R. E. and TAYLOR P. H. Diffraction of a directionally spread wave group by a cylinder[J]. Applied Ocean Research, 2003, 25(6): 301-320.
[12] BALAJI R., SANNASIRAJ S. A. and SUNDAR V. Detection of wave groups from the motion behaviour of a discus buoy[J]. Journal of Hydro-Environment Research, 2008, 1(3-4): 195-205.
[13] LIU Si, LIU Shu-xue and LI Jin-xuan et al. An emperical wave envelope spectrum and the simulation of irregular sea wave groups[C]. Proceedings of the International Offshore and Polar Engineering Conference. Beijing, 2010, 268-273.
[14] WANG Xing-gang, SUN Zhao-chen and LIANG Shuxiu et al. Effect of water depth and spiral strake on hydrodynamic characteristic of classic spar[J]. China Offshore Platform, 2011, 26(1): 23-30(in Chinese).
[15] CHATJIGEORGIOU I. K., MAVRAKOS S. A. Comparative evaluation of numerical schemes for 2D mooring dynamics[J]. International Journal of Offshore and Polar Engineering, 2000, 10(4): 301-309.
[16] XU De-lun, HOU Wei and ZHAO Meng et al. Statistical simulation of wave groups[J]. Applied Ocean Research, 1993, 15(4): 217-226.
[17] YU Yu-xiu, GUI Man-hai. Numerical simulation and physical simulation of sea wave groups[J]. China Ocean Engineering, 1996, 10(3): 295-305.
[18] CHEN Xiao-hong. Studies on dynamic interaction between deep-water floating structures and their mooring/tendon systems[D]. Ph. D. Thesis, Texas, USA: Texas A and M University, 2002.
[19] LI Bin-bin, OU Jin-ping. An effective method to predict the motion of DDMS platform with steel catenary riser[C]. Proceedings of the Twentieth (2010) International Offshore and Polar Engineering Conference. Beijing, 2010, 521-528.
[20] LI Bin-bin, OU Jin-ping. Numerical study on mathieu instability of ddms platform[C]. ASME 2010 29th International Conference on Ocean, Offshore Arctic Engineering. Shanghai, 2010, 127-134.
10.1016/S1001-6058(10)60167-9
* Project supported by the National Natural Science Foundation of China (Grant No. 50921001), the National High Technology Research and Development Program of China (863 Program, Grant No. 2007AA11Z130).
Biography: SUN Zhao-chen (1960-), Male, Ph. D., Professor
LIANG Shu-xiu, E-mail: sxliang@dlut.edu.cn
- 水動力學研究與進展 B輯的其它文章
- LATTICE BOLTZMANN METHOD SIMULATIONS FOR MULTIPHASE FLUIDS WITH REDICH-KWONG EQUATION OF STATE*
- DYNAMIC ANALYSIS OF FLUID–STRUCTURE INTERACTION OF ENDOLYMPH AND CUPULA IN THE LATERAL SEMICIRCULAR CANAL OF INNER EAR*
- SIMULATIONS OF FLOW INDUCED CORROSION IN API DRILLPIPE CONNECTOR*
- NUMERICAL SIMULATION OF FLOW OVER TWO SIDE-BY-SIDE CIRCULAR CYLINDERS*
- NUMERICAL STUDY OF HYDRODYNAMICS OF MULTIPLE TANDEM JETS IN CROSS FLOW*
- EXPERIMENTAL STUDY ON SEDIMENT RESUSPENSION IN TAIHU LAKE UNDER DIFFERENT HYDRODYNAMIC DISTURBANCES*